
搜索结果: 1-15 共查到“理学 飞行器”相关记录45条 . 查询时间(0.189 秒)

等离子体由于其特殊的电磁特性,在飞行器隐身技术中受到关注。与材料隐身和外形隐身相比,等离子体隐身具有宽带电磁波吸收、灵活部署等优点。同时,等离子体参数的可调性和等离子体源组合模式的可重构性使该技术具有较高的动态控制能力。

2023年6月2日晚七点,第四十七期农声讲坛于西校区植保楼报告厅举行。北京理工大学机械与车辆学院教授赵杰亮受邀出席,作主题为“神奇的仿生――蜜蜂腹部变形机制与变体飞行器设计”的讲座。本次活动由周紫怡同学主持。
飞行器周边等离子体产生机制及其对电磁通信的影响(图)
飞行器 等离子体产生机制 电磁通信
2023/1/4
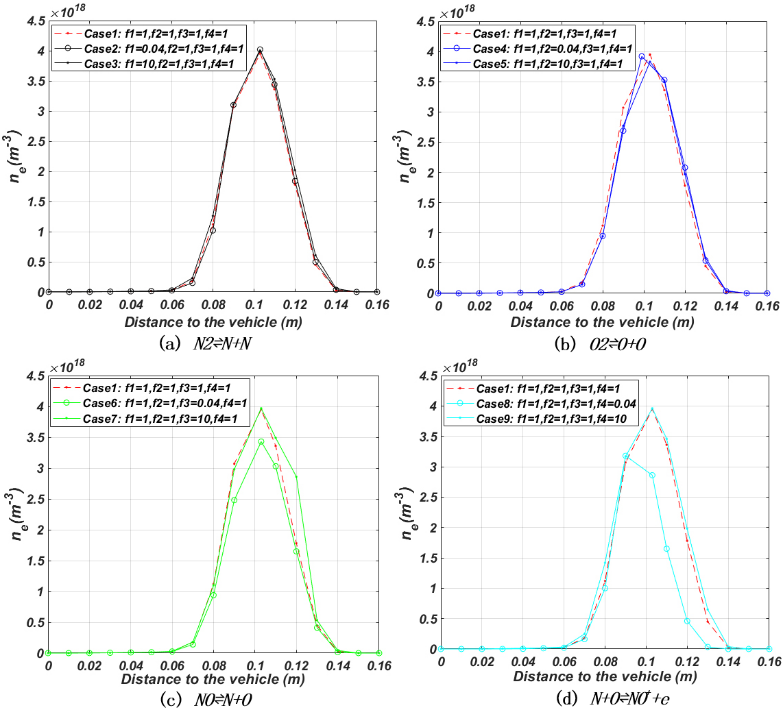
近日,核学院等离子体物理与聚变工程系多相等离子体课题组在该领域的研究取得了进展,通过建立高超等离子体流动与电磁波多层传输模型,分析了非电离反应对飞行器再入过程中等离子体产生机制和电磁波通信的影响,并提出通过降低NO?N+O反应速率来缓解射频中断的潜在新方案。该研究工作以“Effect of non-ionizing reaction rate (assumed to be controllable...
针对飞行器机动过程中轨迹测量误差问题,建立机动目标运动状态模型集,使用交互多模型(IMM)算法解决了单一模型对运动状态描述不全面而导致滤波精度低的问题;在无迹卡尔曼滤波(UFK)中引入自适应因子,实时调整过程噪声协方差矩阵,解决了观测误差先验不准确的问题;在IMM算法中,增加了基于压缩率的自适应概率转换因子,提高了IMM算法的收敛速率,最终形成了一种新的AIMM-AUKF轨迹测量滤波算法,实现了对...
“太阳轨道飞行器”传回首次测量数据
太阳轨道 飞行器 测量数据
2020/2/25
据欧洲空间局(ESA)官方网站近日消息称,“太阳轨道飞行器”的首次测量数据已成功传达地面,向地球的国际科学家团队证实了在部署了航天器吊臂后,航天器的重要科研设备――磁力计仪器状况良好。为进一步揭开为期11年的太阳活动周期、太阳磁场的产生以及太阳风粒子如何加速到很高能量等谜团做准备。
NASA发射太阳轨道飞行器――将揭示太阳磁场奥秘
NASA发射 太阳轨道 飞行器 太阳磁场
2020/2/11
据俄罗斯卫星网报道,当地时间2020年2月9日,在美国佛罗里达州卡纳维尔角空军基地,欧洲航天局与美国航天局联合进行了“太阳轨道飞行器”的发射,它被安装在美国联合发射联盟公司Atlas V411型运载火箭上。
基于STK的飞行器通信链路仿真研究
STK平台 测控链路 仿真
2020/8/21
提出一种基于STK的飞行器通信链路仿真方法,该方法以飞行器和地面站为低层场景构建平台,利用飞行器轨道、姿态和天线方向图等外部信息,计算和仿真求出地面站跟踪飞行器方位角、俯仰角和距离及飞行器天线安装角的相关信息,为飞行器测控性能分析及天线安装位置提供依据。
在30~70km空域机动飞行的高超声速飞行器的优点是可以耦合利用所处空域的空气产生的升力和高速飞行的离心力进行远距离机动滑翔飞行,具有重要的实用价值.尽管过去数十年在高超声速流动研究方面取得显著进展,但在设计研究近空间远程滑翔的高超声速飞行器方面仍然存在许多挑战,特别是对特定飞行条件下的流动机理了解不清楚.本文介绍了作者研究团队在开展近空间高超声速飞行器有关的关键气动问题方面的研究进展,主要包括:...
复杂空间飞行器控制与导航中的基础理论研究取得进展
飞行器控制 卡尔曼滤波算法 滤波理论 稳定性
2021/9/1
大气层外飞行器状态的实时滤波估计是空天防御的关键问题之一,由于飞行器动力学系统通常包含强非线性系统,传感器具有混杂的量测误差以及需要对状态滤波精度进行实时评估。而目前已有的非线性滤波方法只能在不确定性足够小时保证稳定性,并且缺少滤波精度实时评估的理论。因此课题中的实际需求对已有的滤波理论方法提出了很大的挑战性,迫切需要研究阵对非线性不确定系统的滤波理论与方法,保证滤波算法的稳定性,并实现滤波误差协...
高超声速飞行器横侧向失稳非线性分岔分析
高超声速飞行器 大攻角飞行 分岔理论 横侧向失稳
2019/1/2
针对滑翔式高超声速飞行器大攻角横侧向失稳问题,采用延拓算法和分岔理论,求解并分析了以俯仰舵偏为连续参数的稳态平衡分岔图和以副翼舵偏为连续参数的横侧向机动稳态平衡分岔图,对平衡分支的稳定性和突变点进行了分析,并给出了特征根拓扑结构变化.研究表明,高超声速飞行器存在极限分岔点、Hopf分岔点以及叉型分岔点,且从叉型分岔点延伸出多个平衡分支,引起横侧向的自滚转失稳;从Hopf分岔点延伸出极限环分支,该分...
针对建模为切换多胞模型的飞行器动力学系统执行机构失效情况下的控制问题, 提出一种自适应补偿控制方案. 首先针对存在不确定的飞行器大包线切换多胞系统设计一种自适应增益调度控制器, 以保证全包线稳定飞行; 然后, 针对存在执行机构失效、且失效值和失效模式未知的情形, 设计一种自适应容错控制律, 并结合公共Lyapunov 函数和平均驻留时间方法证明了闭环系统的稳定性. 该方案解决了飞行器切换多胞系统容...
丽水学院现代科学技术概论课件宇宙篇第一章 飞行器及宇宙航行展望
丽水学院 现代科学技术概论 课件 宇宙篇 第一章 飞行器及宇宙航行展望
2014/8/27
丽水学院现代科学技术概论课件宇宙篇第一章 飞行器及宇宙航行展望。
输出重定义的高超声速飞行器鲁棒自适应控制律设计
高超声速 输出重定义 不确定性 鲁棒自适应控制
2014/4/15
针对一个吸气式高超声速飞行器模型,研究了其鲁棒自适应控制方法并进行了稳定性分析。针对高超声速飞行器的非最小相位特征,通过输出重定义的方法使非最小相位系统的不稳定零动态变为渐近稳定。采用反馈线性化方法设计控制器,实现对速度信号和航迹角信号的稳定跟踪,同时采用切换控制方法消除系统不确定性带来的影响,提高系统的鲁棒性。稳定性分析结果证明系统具有公共李雅普诺夫函数,且所有状态量均能收敛到原点附近的一个小邻...
基于参数依赖滚动时域H∞控制的高超声速飞行器控制
高超声速飞行器 参数依赖滚动时域H∞控制 LPV 模型 张量积模型转换
2014/3/31
针对输入受限的高超声速飞行器强耦合、强非线性以及严重不确定性的特点, 提出一种参数依赖滚动时域H∞ 控制(PD-RHHC) 的方法. 首先在考虑控制输入约束的条件下,引入参数依赖Lyapunov 函数和松弛因子并提出了基于LMI 优化的PD-RHHC; 然后采用函数替换方法, 结合张量积模型转换方法实现高超声速飞行器(HSV) 纵向非线性弹性模型的LPV 描述, 并将PD-RHHC 应用到高超声速...