
搜索结果: 1-15 共查到“工学 机构设计”相关记录105条 . 查询时间(0.149 秒)
基于双耦合线圈的无人机轻量化无线充电耦合机构设计
无线电能传输 感应式 轻量化 无人机
2024/3/6
针对中大型无人机无线充电需求,设计了一种双耦合线圈无人机无线充电耦合机构,该耦合机构在满足无人机接收侧轻量化设计的同时,具有较高的传输能效与一定的抗偏移能力。双接收线圈安装在无人机双侧底部支架位置,双发射线圈安装在与无人机支架倾斜角度相同的梯形发射平台上,以减小无人机大范围偏移,同时采用顺向串联的形式,保证无线充电的均匀性。采用串联-串联S-S(series-series)补偿结构,运用有限元仿真...
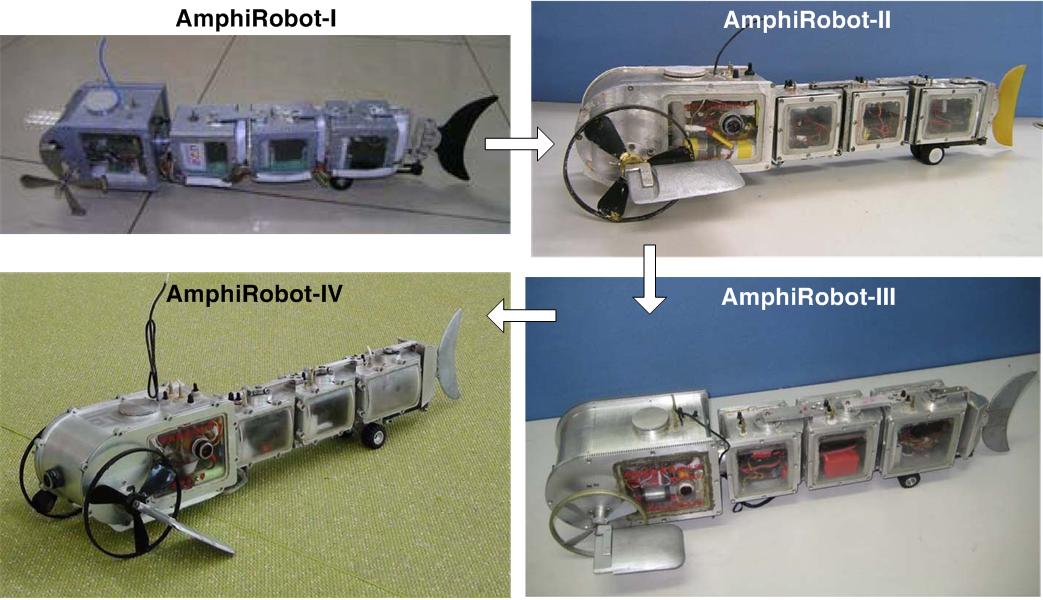
成果受到国家863项目“多模态仿生两栖机器人机构设计与运动控制 ”支持。通过机构创新和系统集成,以仿鱼推进技术为基础,辅以轮、桨、鳍一体化推进机构,研制具有快速游动性能、强大的环境感知功能及良好的水陆环境适应能力的两栖服务机器人。
小口径舰炮快速补弹系统装弹机构设计及仿真分析
装弹机构 振动式缓存漏斗 传输机构 仿真分析
2020/8/21
设计了一种振动式缓存漏斗组件与传输机构一体的新型装弹机构,介绍了装弹机构的工作原理,并进行了相关计算分析,实现了弹药的顺利交接与传输。建立装弹机构虚拟样机模型,对装弹机构进行动力学仿真分析。仿真结果表明:弹药在振动式缓存漏斗中随漏斗一起振动,可保持松散状态,避免了弹药之间因相互挤压造成的卡弹;弹药到传输机构后所受冲击力较小,可实现平稳传送。该机构可有效提高小口径舰炮快速补弹系统装弹效率,具有应用价...
为了解决PGK应用于低速旋转火箭弹,弹丸转速超出PGK翼筒的转速范围时,翼筒无法在惯性空间下保持不转而失去弹道修正能力,在保持原有尺寸和基本结构不变的条件下,设计新型云台式PGK,拓宽弹道修正所需的转速范围。根据PGK工作环境对其结构进行力学仿真,仿真计算结果表明,新型的云台式PGK可将适用的弹丸转速从原来的4.76~19.04 r/s改变为0~46 r/s。
针对某装甲车辆自动装填系统中弹壳自动收抛装置的运动要求及空间约束问题,系统地提出了一种基于刚体导引的连杆机构的构型设计方法。基于实际工况,确定的连杆机构的刚体导引位置,建立基于二杆组的四连杆机构运动数学模型,应用Matlab计算软件,进行连杆参数设计计算,综合出具有期望运动曲线的四连杆举升机构,并进行机构的结构设计与分析,验证四连杆机构设计方法的有效性。所提出的设计方法为解析设计方法,设计过程直观...
一维弹道修正执行机构设计与仿真
弹道修正 修正执行机构 数值仿真
2018/3/12
设计适用于小口径榴弹的分层三片式阻力修正执行机构,利用虚拟样机软件验证阻力机构的可靠性;建立阻力执行机构安装在不同位置、不同展开高度的修正弹模型;利用计算流体力学软件对不同弹丸模型进行绕流流场数值模拟,获得其在不同马赫数、不同攻角情况下的气动力参数并分析其飞行稳定性。结果表明,阻尼片能够顺利展开,可以为修正弹提供的阻力系数比值范围为:1.86~5.19。
针对水稻钵苗宽窄行Z字形移栽农艺要求,提出了一种差速式水稻钵苗Z字形宽窄行移栽机构,利用差速轮系的不等速传动和空间传动,以空间轨迹实现水稻钵苗Z字形宽窄行移栽。将非均匀B样条曲线理论应用于非圆齿轮节曲线的拟合,并采用坐标变换方法建立了机构齿轮箱轮系的数学模型。将水稻钵苗Z字形宽窄行移栽的轨迹和姿态要求参数化为9个具体的运动学优化目标,编写了基于机构数学模型的可视化参数优化界面,利用该软件界面分析了...
耙齿式残膜回收机自动脱膜机构设计
优化 残膜回收机 响应面分析 脱膜率
2017/11/23
针对耙齿式残膜回收机回收残膜后缺乏自动脱膜机构的现状,设计了耙齿式残膜回收机自动脱膜机构。分析平行四连杆脱膜机构的运动稳定性可靠性及脱膜顺畅性,设计液压装置进行脱膜,并在试验的基础上优化机构,对不同形式刮板进行试验及分析并最终设计适合耙齿式残膜回收机的"倒八字"型刮板。针对影响自动脱膜机构工作效率的关键部件和影响因素分析其运动及受力情况,对"倒八字"型刮板进行影响因素的响应面分析。可得齿板距、刮板...
为了提高枪械回转式闭锁机构的设计质量与效率,将设计分析一体化思想引入设计过程中,研究并开发了回转式闭锁机构设计分析一体化软件。分析了闭锁机构设计过程,规划了软件应包括结构参数设计、零部件参数化建模、自动装配与干涉分析、机构动作分析、结构强度分析和数据管理等基本模块,提出了基于计算机辅助设计、工程和制造UG软件集成各计算程序及功能模块的软件总体框架。解决了软件集成框架设计与开发、UG/Open AP...
蛇怪蜥蜴踏水奔跑机理研究及仿生机构设计
踏水机理 固液作用 仿生设计 滑水航行
2017/12/1
蛇怪蜥蜴踏水奔跑过程中,脚掌会在气穴封闭前移出水面,并不断调整姿态适应变化的流场.为分析踏水机理,增加了对出水过程的研究,建立了脚掌进出水流体动力学模型,运用RNG(renormalization group)k-ε湍流方程,结合气穴扩张收缩变化,获得了最优上提时间.进一步针对脚掌姿态调整行为,解析了3维驱动力随入水角度的变化规律,推导了托举力与速度的数学函数,并通过实验初步验证了数值计算模型的正...
一种新型深水炸弹引信解除保险机构设计
引信 保险机构 解保 试验分析
2017/8/14
为了适应深水炸弹引信在深水中能够安全可靠的接触保险,设计了一种新型的多重引信保险机构,该机构具有投弹保险、限位保险和辅助保险的多重功能,发射保险利用投弹重力环境剪断剪切销解除投弹保险;限位保险利用水压力来实现水压机构的错位移动解除保险;辅助保险确保了引信在未正常工作的情况下的安全处理。通过试验验证了多重保险的可靠性,结果表明:该机构对于深弹引信的安全性和可靠性是可行的。

林松,男,1957年7月7日生,汉族,在德国德累斯顿工业大学(TU Dresden)以优异成绩(最高成绩)取得机构学博士学位,完成非弹性体力学方面的博士后研究,在德国高校留学和从事教学和科研工作18年,其间申请并承担三项德国国家级中长期重大综合性研究课题,三项国家级教学与科研研究课题和八项较大工业产品研发课题,在德最后任职为教授级学术带头人,至今仍保持德国科学委员会重大跨学科项目SFB639成员,...

王立存,男,博士,教授,重庆工商大学机械工程学院副院长,制造装备机构设计与控制重庆市重点实验室副主任,装备系统服役健康保障重庆市国际联合研究中心方向带头人,重庆工商大学涡旋压缩机研究所所长,重庆工商大学油处理设备冷凝技术研究所所长,清华大学访问学者,美国密西根大学访问学者,曾荣获黄尚廉院士优秀青年创新奖,萧丽玉教育发展基金优秀教师奖等。

朱朝宽,男,1970年12月生,重庆璧山县人,教授,渝州大学汽车与拖拉机制造专业,本科毕业,获学士学位;后又在重庆大学学习车辆工程专业,获硕士学位。历任渝州大学机械工程系助教、讲师、副教授。两校合并后,任机械电子学科教授,主要研究方向为现代装备的结构设计和控制系统应用设计。先后在国内核心期刊“机械科学与技术”、“机械设计”等发表论文10余篇。撰写设备控制类著作三部,约70万字,申请发明专利3项,参...

廖兰,重庆工商大学机械工程学院机械制造专业教师。女,1958年1月生,重庆市璧山县人,教授,四川大学制造科学与工程学院机械工程系(原成都科技大学机械工程系)机械设计制造及其自动化(原机械制造工艺及设备)专业毕业,学士学位;历任重庆工商大学(原渝州大学)机械系机械基础教研室助教、讲师,重庆工商大学(原渝州大学)机械系机械制造专业教研室主任、副教授,重庆工商大学机械工程学院机械制造专业方向负责人、教授...