
搜索结果: 1-15 共查到“机器人控制 控制”相关记录755条 . 查询时间(2.999 秒)

2024年3月18日南开大学教授孙宁做客CAA云讲座并作题为“仿生气动机器人动力学分析与智能控制”的报告。
中国科学院沈阳自动化研究所专利:一种可旋转舵推进器的水下机器人控制方法

2020级机电控制工程专业智能机器人竞赛成功举办(图)
机电控制 智能机器人
2024/3/7
2024年1月3日上午,“SMC”杯气动智能机器人大赛、“海天集团”杯液压气动创新设计竞赛暨2020级机电控制工程系二级项目验收,在燕山大学东校区液压实验室成功举办。燕山大学机控系主任袁晓明和部分教师代表出席本次活动,2020级机电控制工程专业全体本科生参加此次竞赛活动。
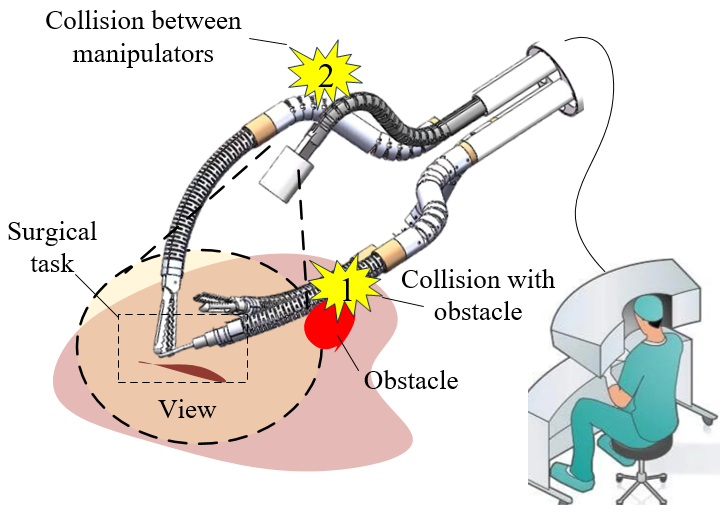
沈阳自动化所在连续体机器人主动避障控制方面研究取得新进展(图)
连续体机器人 医疗机器人
2024/1/12
2023年12月28日,中国科学院沈阳自动化研究所刘浩研究员与友谊医院张忠涛教授在连续体机器人的主动避障控制方面研究取得新进展,相关成果以Active collision avoidance for teleoperated multi-segment continuum robots toward minimally invasive surgery为题在The International Jo...
机械臂变长度误差跟踪迭代学习控制
迭代学习控制 误差跟踪 变迭代长度 机械臂
2024/1/16
针对任意初始状态下机械臂轨迹跟踪问题,提出一种变长度误差跟踪迭代学习控制(Iterative learning control,ILC)方法.首先,构造不依赖于期望轨迹的双曲余弦型期望误差轨迹,放宽经典迭代学习控制初始状态要求严格一致的条件.由于该误差轨迹只需设置一个常数项,因而能够有效减少计算量,使得期望误差轨迹的设计更为简单.其次,考虑机械臂运行区间随迭代次数变化的问题,构建虚拟误差变量补偿机...
中国科学院深圳先进技术研究院专利:机器人远程控制装置及机器人系统
中国科学院深圳先进技术研究院 专利 机器人 远程控制 机器人系统
2023/11/27
中国科学院深圳先进技术研究院专利:机器人远程控制装置及机器人系统
中国科学院深圳先进技术研究院专利:管家机器人及基于管家机器人的网络控制系统
中国科学院深圳先进技术研究院专利:手术机器人的控制方法和系统
中国科学院深圳先进技术研究院 专利 手术机器人 控制方法
2023/11/22
中国科学院深圳先进技术研究院专利:手术机器人的控制方法和系统
针对移动机器人视觉伺服跟踪控制问题,提出一种基于自适应动态规划(Adaptive dynamic programming,ADP)的控制方法.通过移动机器人上的相机拍摄共面特征点的当前图像、期望图像以及参考图像,利用单应性技术得到移动机器人当前的位姿信息与期望的位姿信息(即平移量与旋转角度),从而通过当前与期望的平移旋转之间差值得到系统的开环误差模型.进而,针对此系统设计最优控制器,同时做合适的控...
中国科学院合肥物质科学研究院专利:连续型机器人的光纤形状估测反馈控制方法
中国科学院深圳先进技术研究院专利:一种控制多机器人服务量的处理方法及系统

王佐勋,教授,博士,硕士研究生导师,电气工程与自动化学院自动化研究所所长。主要研究方向为机器人的检测与控制、嵌入式检测与控制等。
基于外环速度补偿的封闭机器人确定学习控制
确定学习 速度补偿控制 神经网络 封闭机器人
2024/1/16
针对未开放力矩控制接口的一类封闭机器人系统,提出一种基于外环速度补偿的确定学习控制方案.该控制方案考虑机器人受到未知动力学影响,且具有未知内环比例积分(Proportional-integral,PI)速度控制器.首先,利用宽度径向基函数(Radial basis function,RBF)神经网络对封闭机器人的内部未知动态进行逼近,设计外环自适应神经网络速度控制指令.在实现封闭机器人稳定控制的基...
中国科学院合肥物质科学研究院专利:一种基于嵌入式控制器的机器人控制方法和装置
中国科学院合肥物质科学研究院专利:一种机器人的控制方法以及装置与系统