
搜索结果: 1-9 共查到“工学 行走机器人”相关记录9条 . 查询时间(0.11 秒)
中国科学院上海应用物理研究所等构建高效DNA行走机器人
中国科学院上海应用物理研究所 高效DNA 行走机器人
2017/3/31
中科院上海应用物理研究所与华东师范大学合作,在DNA分子机器方面取得新进展,构建了一种核酸外切酶驱动的高效DNA行走机器人。相关成果近日发表于德国《应用化学》。细胞内许多功能的实现和宏观世界中的机器运转一样巧妙,而在试管中模拟细胞内的动态有序结构,构筑人工分子机器也引起了研究者的广泛兴趣。DNA分子具有强大的序列可编程性及精确的分子识别能力,被认为是设计分子机器的重要元件。设计并构建高效率的DNA...
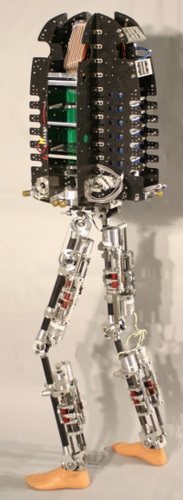
日本开发出两足式高速行走机器人
日本 两足式高速行走机器人 机器人技术
2014/10/23
据《日刊工业新闻》近期报道,日本东京大学研究人员开发出时速可达4.2公里的两足式高速行走机器人。研究小组采用高速相机和高效驱动器相配合,一秒达600帧的高速相机瞬间检测机器人腰部和腿部动作,通过高速驱动器驱动脚部动作,保持奔跑中的动平衡。开发的机器人腿长14厘米,重量800克。如换算成腿长70厘米的人类,4.2公里/小时的高速行走速度相当于人类20公里/小时的行进速度。该机器人还可以实现翻筋斗等空...
石油套管内自主行走机器人技术
石油套管内自主行走机器人技术 石油套管内机器人 水平井生产测井仪器
2010/8/23
石油套管内机器人是指一种能在石油套管内(垂直或水平方向上)自主行走并能克服多种障碍的机器人。携带多种检测仪器或打捞工具可完成套损的检测、测井和井下落物打捞等井下作业任务。套损已越来越成为影响油井正常生产的主要因素,对套损的研究除了套损的机理和防治技术以外,对套损的检测已成为研究的重点。但对于一些如“径缩”或“错断”等竖直井套损,检测仪器可能不能通过或到达套损位置,因此现有的这些方法不能完成套损检测...
美研制出双腿直立行走机器人 受冲撞仍直立(图)
直立行走 机器人
2009/10/28
据美国媒体报道,曾研制出大狗机器人的波士顿动力公司近日又有新发明,他们研制出一种像真人一样四处活动的机器人。该公司正在制造Petman的原型,来检验防护服的性能。
双足机器人主要模仿人类的行走,可以完成较复杂的滑稽动作,自主躲避障碍物。同时利用中科院自动化所在语音识别方面的优势,将语音识别的功能集成到机器人上,人们可以通过语音来实现对机器人的控制。双足机器人大概1.5米高,设计重点是机器人的双足行走和滑稽舞蹈。该机器人科技含量水平高;在双足机器人上首次采用语音控制;人机协同,观众参与功能;行走功能;完成较复杂动作功能;语音控制功能。
管内步伐式行走机器人
管内机器人 步伐式 防滑 大牵引力
2008/7/21
管内步伐式行走机器人由太原理工大学研制成功,并己于1994年12月通过了山西省科委的技术鉴定.该机器人可在管内双向行走,自动随管道弯度转向.本文详细阐述了机器人的机构,在力学分析的基础上介绍了脚靴的自锁机构以及牵引力和脚靴撑紧力间的关系,论述了产生大牵引力而不打滑这一管内步伐式机器人的特点.
行走机器人高精度视觉系统
机器人 视觉系统 双重指令确认 图像识别
2012/11/13
本系统是为行走机器人研制的高精度视觉系统,具备双重指令确认功能,不仅大大提高了操作的安全可靠程度,同时为机器人操作的控制精度提供了必要的保证,可使机器人从x,y,z三维空间中自动搜寻目标,准确无误地进行操作.