
ЫбЫїНсЙћ: 1-15 ЙВВщЕНЁАЙЄбЇ еЯЁБЯрЙиМЧТМ92Ьѕ . ВщбЏЪБМф(0.197 Уы)

ШеЧАЃЌЛљгкЖрФЃЬЌДѓФЃаЭЁАИДЕЉЁЄэјЫМЁБЃЈMouSiЃЉЃЌИДЕЉДѓбЇздШЛгябдДІРэЪЕбщЪвЃЈFudanNLPЃЉЮЊЪгеЯепСПЩэДђдьЕФЁАЬ§МћЪРНчЁБAPPЩЯЯпЃЌНЋГЩЮЊЪгеЯШЫЪПЕФЩњЛюжњЪжгыжЧФмЙмМвЁЃ
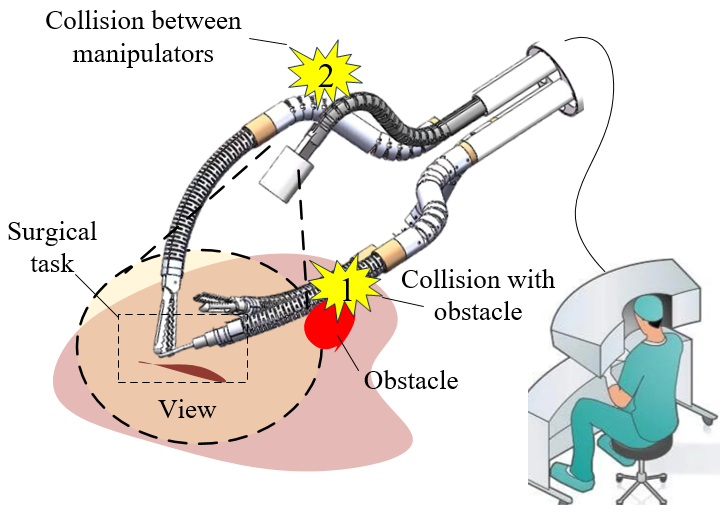
2023Фъ12дТ28ШеЃЌжаЙњПЦбЇдКЩђбєздЖЏЛЏбаОПЫљСѕКЦбаОПдБгыгбвъвНдКеХжвЬЮНЬЪкдкСЌајЬхЛњЦїШЫЕФжїЖЏБмеЯПижЦЗНУцбаОПШЁЕУаТНјеЙЃЌЯрЙиГЩЙћвдActive collision avoidance for teleoperated multi-segment continuum robots toward minimally invasive surgeryЮЊЬтдкThe International Jo...
БОЪЕгУаТаЭзАжУЩцМАвЛжжИюВнЛњЃЌЬиБ№ЪЧвЛжжа§БлЪНздЖЏБмеЯИюВнЛњЃЌАќРЈЕВАхЃЌвКбЙТэДяЃЌЖрТЗЗЇЃЌа§БлЃЌЮЯОэЕЏЛЩЃЌЯоЮЛТнЖЄЃЌжЙЭЦжсГаЃЌгЭЙмЃЌСЂжсЃЌжЇГХИЫЃЌвКбЙМѕе№ЦїЃЛЫљЪівКбЙМѕе№ЦїЁЂжЇГХИЫАВзАдкСЂжсЩЯЖЫЃЛЫљЪіЮЯОэЕЏЛЩЁЂЕВАхАВзАдкСЂжсЯТЖЫЃЛЫљЪіжЙЭЦжсГаАВзАдкСЂжсПЈЛЗЩЯБэУцЃЌЫљЪіа§БлАВзАдкжЙЭЦжсГаЩЯЁЃЫљЪівКбЙТэДяАВзАдка§БлЭтШІЧЛжаЁЃЫљЪіЖрТЗЗЇАВзАдкЕВАхФкЧЛжаЃЌЫљЪіЯоЮЛТнЖЄДЉЙ§а§БлЩЯЕФЭЈПзЧвПЈдкСЂжсЕФдВЛЁЯоЮЛВл...
ФЯОЉХЉвЕДѓбЇзЈРћЃКвЛжжЪЪгУгкЙћдАПЩБмеЯГ§ВнЛњЕФвКбЙДЋЖЏЯЕЭГ
ФЯОЉХЉвЕДѓбЇ ЙћдА ПЩБмеЯГ§ВнЛњ вКбЙДЋЖЏЯЕЭГ
2023/12/5
БОЪЕгУаТаЭЙЋПЊСЫвЛжжЪЪгУгкЙћдАПЩБмеЯГ§ВнЛњЕФвКбЙДЋЖЏЯЕЭГЃЌАќРЈИюВнЛњЧ§ЖЏгЭТЗКЭвКбЙТэДяЧ§ЖЏгЭТЗЃЛЫљЪіИюВнЛњЧ§ЖЏгЭТЗЩЯЩшжУгаЕквЛвКбЙБУЁЂЖўЮЛЫФЭЈЗЇКЭвКбЙИзЃЛЫљЪіЕквЛвКбЙБУКЭЖўЮЛЫФЭЈЗЇжЎМфЕФИюВнЛњЧ§ЖЏгЭТЗЩЯСЌНггаЕквЛвчСїЙмЕРКЭЖўЮЛЖўЭЈЗЇЙмЕРЃЛЫљЪіЕквЛвчСїЙмЕРЩЯЩшжУгаЕквЛвчСїЗЇЃЛЫљЪіЖўЮЛЖўЭЈЗЇЙмЕРЩЯЩшжУгаЖўЮЛЖўЭЈЗЇЃЛЫљЪівКбЙТэДяЧ§ЖЏгЭТЗЩЯЩшжУгаЕкЖўвКбЙБУКЭвКбЙТэДяЃЛЫљЪіЕкЖўвКбЙБУКЭвКбЙТэжЎМфЕФвКбЙТэДяЧ§...
вЛжжЗТаЮБмеЯГ§ВнзївЕЛњЃЌАќРЈПђМмзмГЩЁЂжїГ§ВнЕЖзмГЩЁЂБмеЯГ§ВнЕЖзмГЩКЭаазпзмГЩЃЌЫљЪіЕФПђМмзмГЩАќРЈГ§ВнЯфКЭГ§ВнЯфвЛВрПЩЕїНкЕФаќЙвМмЃЌЫљЪіЕФБмеЯГ§ВнЕЖзмГЩАќРЈСЌНгМмЁЂЗРЛЄежКЭБмеЯГ§ВнЕЖЕчЛњЁЃБОЗЂУїЕФгавцаЇЙћЮЊЃКБОЗЂУїгаЕчСІЧ§ЖЏжїГ§ВнЕЖЕчЛњКЭБмеЯГ§ВнЕЖЕчЛњЙЄзїЃЌЪЙЕУЕЖжсДјЖЏГ§ВнЕЖа§зЊГ§ВнКЭЫЎЦНЕЖЦЌа§зЊГ§ВнЃЌЪЕЯжДПЕчЧ§ЖЏ,ЮоашЪЙгУЦћгЭЛђВёгЭФкШМЛњЖЏСІЃЌБмУтСЫећЛњжиСПЙ§ДѓЧвХХЗХКЭдывєЮлШОЕФБзЖЫЃЌПЩгааЇЪЕЯжТЬ...
жаЙњПЦбЇдКН№ЪєбаОПЫљзЈРћЃКвЛжжКЌгадЮЛЩњГЩРЉЩЂеЯЕФИДКЯЭПВужЦБИЗНЗЈ
жаЙњПЦбЇдКН№ЪєбаОПЫљ зЈРћ дЮЛЩњГЩРЉЩЂеЯ ИДКЯЭПВу
2023/11/17
БОЗЂУїЩцМАдкИпЮТКЯН№ЛљЬхЩЯжЦБИИпЮТЗРЛЄИДКЯЭПВуЕФММЪѕ,ОпЬхЕиЫЕЪЧвЛжжКЌгадЮЛЩњГЩРЉЩЂеЯЕФИДКЯЭПВужЦБИЗНЗЈ,ЫќРћгУдЄЯШГСЛ§ЕФЖрВуФЄ,НсКЯЯрЙиЕФШШДІРэжЦЖШ,жЦБИГівЛжжФмдкИпЮТЬѕМўЯТвжжЦЭПВудЊЫиЯђЛљЬхРЉЩЂ,ДгЖјЬсИпЭПВуЪЙгУЪйУќЕФИДКЯЭПВуЁЃБОЗЂУїЕФЙЄвеСїГЬЪЧЃКЯШЖдИпЮТКЯН№ЛљЬхНјаадЄДІРэЃЛдйЭЈЙ§ЕчЖЦЙЄвежЦБИвЛВубЧЮЂУзМЖЕФRe-NiЖЦВуЃЛЭъГЩЕчЖЦКѓДІРэВНжшКѓ,дкRe-NiЖЦВужЎЩЯвРДЮГСЛ§вЛВуMCrAlYЭПВуКЭ...
жаЙњШШДјХЉвЕПЦбЇдКХЉвЕЛњаЕбаОПЫљзЈРћЃКвЛжжСЂЪНздЖЏБмеЯГ§ВнЛњ
жаЙњШШПЦдКХЉЛњЫљ зЈРћ здЖЏБмеЯ Г§ВнЛњ
2023/9/21
жаЙњШШДјХЉвЕПЦбЇдКХЉвЕЛњаЕбаОПЫљзЈРћЃКвЛжжСЂЪНздЖЏБмеЯГ§ВнЛњЁЃ
жаЙњПЦбЇдКН№ЪєбаОПЫљзЈРћЃКвЛжжАќКЌбѕЛЏяЏЛюадРЉЩЂеЯВуЕФИпЮТЭПВуМАжЦБИЗНЗЈ
жаЙњПЦбЇдКН№ЪєбаОПЫљ зЈРћ бѕЛЏяЏ ЛюадРЉЩЂеЯВу ИпЮТЭПВу
2023/8/21
жаЙњПЦбЇдКН№ЪєбаОПЫљзЈРћЃКвЛжжАќКЌбѕЛЏяЏЛюадРЉЩЂеЯВуЕФИпЮТЭПВуМАжЦБИЗНЗЈ
ЮоШЫЭЇ(Unmanned surface vehicle,USV)зїЮЊвЛжжОпгаЙуЗКгІгУЧАОАЕФЮоШЫЯЕЭГ,ЦфзджїОіВпФмСІгШЮЊЙиМќ.гЩгкЫЎУцдЫЖЏЛЗОГНЯЮЊПЊРЋ,ДЋЭГБмеЯОіВпЫуЗЈФбвддкСПЛЏЙцдђЯТзджїЙцЛЎзюгХТЗЯп,ЖјвЛАуЧПЛЏбЇЯАЗНЗЈдкДѓЗЖЮЇИДдгЛЗОГЯТФбвдПьЫйЪеСВ.еыЖдетаЉЮЪЬт,ЬсГівЛжжЛљгкуажЕЕФЩюЖШQЭјТчБмеЯЫуЗЈ(Threshold deep Q network,T-DQN),дкЩюЖШQЭјТч(Deep Q ne...
жаЙњПЦбЇдКЩљбЇбаОПЫљзЈРћЃКвЛжжЮоШЫЛњБмеЯзАжУКЭЗНЗЈ
жаЙњПЦбЇдКЩљбЇбаОПЫљ зЈРћ ЮоШЫЛњ БмеЯзАжУ
2023/3/28
жаЙњПЦбЇдКЩљбЇбаОПЫљзЈРћЃКвЛжжЮоШЫЛњБмеЯзАжУКЭЗНЗЈ
ЛљгкНБРјЕїПиЕФРрФдТіГхЩёОЭјТчИГФмЮоШЫЛњМЏШКздШЛЦєЗЂЕФздзщжЏБмеЯЃЈЭМЃЉ
ЮоШЫЛњ РрФдТіГхЩёОЭјТч здзщжЏБмеЯ
2022/12/19
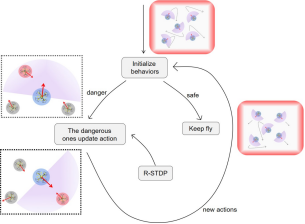
2022Фъ10дТ28ШеЃЌжаЙњПЦбЇдКздЖЏЛЏбаОПЫљдјвубаОПдБПЮЬтзщдкCell PressЯИАћГіАцЩчЦкПЏPatternsЩЯЗЂБэСЫЬтЮЊЁАNature-inspired Self-organizing Collision Avoidance for Drone Swarm Based on Reward-modulated Spiking Neural NetworkЁБЕФбаОПТлЮФЁЃЭХЖгЪмздШЛНчжаЩњЮяМЏШКЗжВМ...
УЄЮФAIЪЕЪБЗвыЫуЗЈЪЧБОШэМўЕФКЫаФММЪѕжЎвЛЃЌПЩвдЪЕЪБЩњГЩКЃСПУЄЮФЪ§зжзЪдДЁЃЦфдЫааТпМЪЧЪзЯШНЋжаЮФЁЂгЂЮФЕШЮФзжБрТыИёЪНЭГвЛзЊЛЛЮЊUnicodeИёЪНЃЌШЛКѓбЁдёУЄЮФРраЭЃЌдйЕїгУУЄЮФAIЪЕЪБЗвыЫуЗЈЃЌОЭПЩвдЪфГіЙњМвЭЈгУУЄЮФЁЂЯжааУЄЮФЁЂШЋЦДУЄЮФЁЂЫЋЦДУЄЮФЁЃ
ДѓШеБОзЁгбжЦвЉЙЋЫОе§дкПЊЗЂПЩШУЬ§еЯепеЦЮеЖдЛАФкШнЕФЁАжЧФмблОЕЁБжеЖЫЁЃетжжжЧФмблОЕгЩИУЙЋЫОгыжўВЈДѓбЇаЃАьГѕДДЦѓвЕPixie DustПЦММЙЋЫОЙВЭЌбажЦЕФЃЌПЩНЋЖдЛАепЕФЗЂбдФкШнМДЪБзЊЛЛЮЊЮФзжЯдЪОЃЌВЂЧвжЇГжЖрШЫЖдЛАЁЃ

ФЯОЉХЉвЕДѓбЇЙЄбЇдКбІН№СжНЬЪкЭХЖгЬсГіСЫвЛжжзджїХЉвЕГЕСОгіеЯЫйЖШПижЦВпТдЃЈЭМЃЉ
бІН№Сж ХЉвЕГЕСО ЫйЖШПижЦВпТд дЄВтХізВ
2022/3/23
ФЯОЉХЉвЕДѓбЇЙЄбЇдКЬсГіЕФгіеЯЫйЖШПижЦВпТдФмЙЛИљОнеЯАЮяЕФдЫЖЏзДЬЌКЭЮЃЯеГЬЖШвдМАеЯАЮягыГЕСОжЎМфЕФОрРыздЖЏЕїећзджїХЉвЕГЕСОЕФЫйЖШЃЌДгЖјЬсИпзджїХЉвЕГЕСОЕФжЧФмадКЭАВШЋадЁЃПижЦВпТдАќРЈСНИіВНжшЃКЪЙгУИФНјЕФеЯАЮяЪБПеЭјИёЭМдкЖЏЬЌЛЗОГжадЄВтХізВЃЌвдМАЪЙгУдЦФЃаЭБмУтХізВЕФЫйЖШЩњГЩЦїЁЃЭЈЙ§вдВнЖтЁЂЭЯРЛњКЭаазпШЫдБЮЊОВЬЌЛђЖЏЬЌеЯАЮяЕФЬяМфЪдбщЃЌБэУїЫљЬсГіЕФЫйЖШПижЦВпТдОпгаНЯЧПЕФПЩааадКЭгааЇадЁЃ
ММЪѕЕФгІаэгыДрШѕВЛАВЕФЩњУќЃКВаеЯепЕФЛЅСЊЭјЙЄзїЪЕМљ
аХЯЂЭЈбЖММЪѕ ДрШѕВЛАВ ЙњМвжЮРэ ВаеЯ ЛЅСЊЭј
2022/3/11
ЛЅСЊЭјЕШаХЯЂЭЈбЖММЪѕгыВаеЯепДрШѕВЛАВЩњУќОГПіжЎМфЕФЙиЯЕЮЪЬтЃЌЪЧЛЅСЊЭјбаОПгыВаеЯбаОПНЛВцСьгђМцОпЯжЪЕЙиЛГгыРэТлЙлееЕФживЊбаОПЮЪЬтЁЃвђДЫЃЌБОбаОПОлНЙжаЙњЬиЖЈгяОГЯТВаеЯепЛЅСЊЭјЙЄзїЕФдкЕиЪЕМљЃЌЬНЫїШчКЮДгВаеЯепЪгНЧЦЪЮіММЪѕгІаэгыДрШѕЩњУќжЎМфЕФФкдкеХСІЁЃЛљгкШ§ФъЖрЕФЬявАЙлВьКЭНќАйУћВаеЯЙЄзїепЕФЩюЖШЗУЬИЃЌБОбаОПМШГЪЯжСЫЛЅСЊЭјИјгшВаеЯепЕФММЪѕгІаэЃЌвВеЙЯжСЫММЪѕИГФмжЎЯТВаеЯепДрШѕВЛАВЕФОГПіЁЃОпЬхбаОПЗЂЯжЃКашвЊДгЙЄ...
жаЙњбаОПЩњНЬг§ХХааАё-Ьѕ
- е§дкМгди...
жаЙњбЇЪѕЦкПЏХХааАё-Ьѕ
- е§дкМгди...
ЪРНчДѓбЇПЦбаЛњЙЙХХааАё-Ьѕ
- е§дкМгди...
жаЙњДѓбЇХХааАё-Ьѕ
- е§дкМгди...
ШЫЁЁЮя-ЦЊ
- е§дкМгди...
ПЮЁЁМў-ЦЊ
- е§дкМгди...
ЪгЬ§зЪСЯ-ЦЊ
- е§дкМгди...
баеазЪСЯ -ЦЊ
- е§дкМгди...
жЊЪЖвЊЮХ-ЦЊ
- е§дкМгди...
ЙњМЪЖЏЬЌ-ЦЊ
- е§дкМгди...
ЛсвщжааФ-ЦЊ
- е§дкМгди...
бЇЪѕжИФЯ-ЦЊ
- е§дкМгди...
бЇЪѕеОЕу-ЦЊ
- е§дкМгди...