
搜索结果: 151-165 共查到“计算机感知”相关记录341条 . 查询时间(3.093 秒)
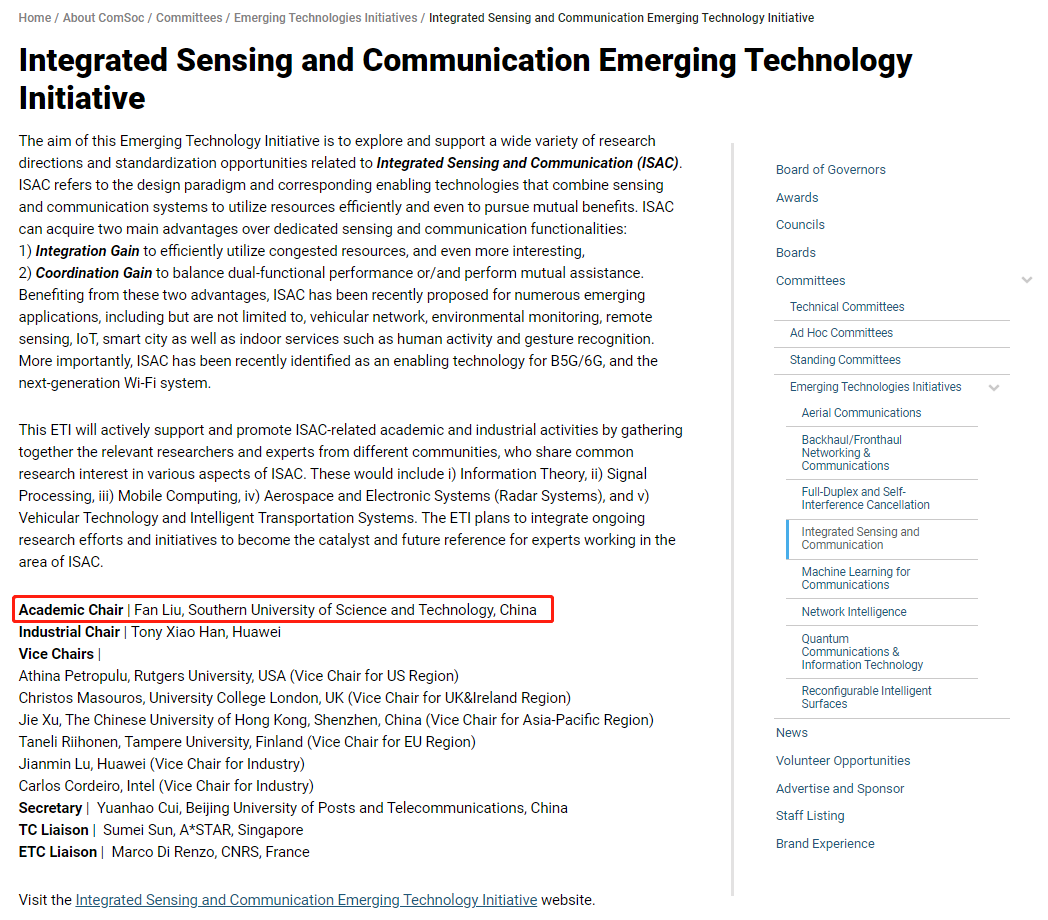
南方科技大学电子与电气工程系刘凡助理教授牵头成立IEEE通信学会“通信感知一体化”新兴技术倡议委员会(图)
南方科技大学电子与电气工程系 刘凡 IEEE通信学会 通信感知一体化 新兴技术倡议委员会
2022/10/20
近日,南方科技大学电子与电气工程系刘凡助理教授牵头,联合华为有限公司和全球多位知名专家学者,在IEEE通信学会(ComSoc)成立了“通信感知一体化”新兴技术倡议委员会(Emerging Technology Initiative on Integrated Sensing and Communication, ETI-ISAC)。成员包含有来自中国、美国、英国、欧盟、澳洲、以色列和新加坡等国家的...

上海交通大学焦李成校友当选俄罗斯自然科学院外籍院士(图)
上海交通大学 焦李成 俄罗斯自然科学院 院士
2021/4/25
近日,俄罗斯自然科学院(Russian Academy of Natural Sciences,RAEN)O.L.Kuznetsov院长向上海交大1982届电工及计算机科学系本科校友、西安电子科技大学人工智能学院焦李成教授发来贺信,祝贺他当选为俄罗斯自然科学院外籍院士。
基于C-V2X车路协同的交通信号控制与优化关键技术及应用
C-V2X 车路协同 交通信号
2022/9/9
基于C-V2X 车路协同的交通信号控制与优化关键技术及应用。获奖年度:2020年。获奖级别:中国智能交通协会科学技术奖二等奖。该项目由北方工业大学、大唐高鸿数据网络技术股份有限公司、滴滴智慧交通科技有限公司、迈锐数据(北京)有限公司等单位完成,本项目属于交通控制技术领域,研究了基于C-V2X 车路协同的交通信号控制与优化关键技术,通过全息精准感知整个交通路网数据,实现交通信号远程控制和智能管理,使...

哈尔滨工业大学人工智能研究院博士生导师左旺孟教授(图)
左旺孟 哈尔滨工业大学人工智能研究院 博士生导师 教授 元学习 网络模型 图像生成 视觉跟踪
2022/9/23
左旺孟,计算机学院长聘教授、博士生导师。长期关注元学习、迁移学习和生成式对抗网络模型方法及其在底层视觉、图像生成、视觉跟踪、物体检测和图像分类等领域的应用。在CVPR/ICCV/ECCV等顶级会议和T-PAMI/IJCV和IEEE Trans.等顶级期刊上发表论文100余篇,谷歌学术引用16,000余次。发表ESI高被引论文8篇。提出的DnCNN模型被正式收入MATLAB 2017b及后续版本的I...

哈尔滨工业大学人工智能研究院屈桢深副教授(图)
屈桢深 哈尔滨工业大学人工智能研究院 副教授 智能无人系统 计算机视觉 智能感知
2022/9/23
屈桢深,男,1973年生,哈尔滨工业大学副教授,博士学位,视觉技术研究室负责人,(山东)德州技术首席专家。2009年赴美国密歇根大学访问。近年一直从事智能无人系统、计算机视觉与智能感知方向的理论和实践工作。目前承担及已承担国家大科学工程、国家自然科学基金、国防基础预研项目多项,在智能无人系统及智能感知等方面取得一系列研究成果,累计发表相关方向论文40余篇。获军队科技进步一等奖一项,国防科技进步二等...
在计算机视觉领域,全景分割是一个新颖且重要的研究主题,它是机器感知、自动驾驶等新兴前沿技术的基石,具有十分重要的研究意义.本文综述了基于深度学习的全景分割研究的最新进展,首先总结了全景分割任务的基本处理流程,然后对已发表的全景分割工作基于其网络结构特点进行分类,并进行了全面的介绍与分析,最后对全景分割任务目前面临的问题以及未来的发展趋势做出了分析,并针对所面临的问题提出了一些切实可行的解决思路。

长安大学主持的国家重点研发计划“大范围自然灾害交通网信息全息感知与智能控制及安全诱导技术装备研发”项目启动暨实施方案论证会召开(图)
长安大学 国家重点研发计划 自然灾害 交通网信息 全息感知 智能控制 安全诱导 方案论证会
2022/5/24
2021年3月28日,由长安大学主持的国家重点研发计划“大范围自然灾害交通网信息全息感知与智能控制及安全诱导技术装备研发”启动会暨实施方案论证会在西安召开。科技部中国21世纪议程管理中心翟正丽高工、陕西省科技厅王晓娜副处长等管理部门领导出席会议。中国地震局地球物理研究所高孟潭研究员、交通运输部公路科学研究院周炜研究员、中国地质科学院地质力学研究所李滨研究员、长安大学彭建兵院士、交通运输部公路科学研...
基于特征的视线跟踪方法研究综述
基于特征 视线跟踪 二维映射模型 三维视线估计
2024/1/23
针对基于特征的视线跟踪方法进行了综述.首先对视线跟踪技术的发展、相关研究工作和研究现状进行了阐述;然后将基于特征的视线跟踪方法分成了两大类:二维视线跟踪方法和三维视线跟踪方法,从硬件系统配置、误差主要来源、头部运动影响、优缺点等多个方面重点分析了这两类视线跟踪方法,对近五年现有的部分基于特征的视线跟踪方法进行了对比分析,并对二维视线跟踪系统和三维视线跟踪系统中的几个关键问题进行了探讨;此外,介绍了...


近日,中国科学院沈阳自动化研究所类生命机器人研发团队联合清华大学和香港大学科研伙伴,在基于生命-机电系统深度融合的类生命机器人研究领域取得新进展,研发了一种以光遗传工程化细胞为生物光敏感元件、以单层石墨烯为生物电子界面的类生命光电晶体管,并将其作为核心光电传感单元构建了类生命视觉感知成像系统,为研发具有高性能和良好生物兼容性的新型视觉假体提供了新思路和新方法。1月30日,该研究成果以《基于光遗传工...

孙显彬(1978―),山东菏泽人,工学博士(后)。青岛理工大学机械与汽车工程学院副教授,硕士生导师,复杂装备智能感知与故障诊断团队骨干研究院。先后在学校人事处、资产管理处工作并担任职务。期间,始终牢记立德树人根本使命,坚持每年为本科生、研究生上课;秉承德以明理、学以精工,主动适应国家海洋强国战略与山东省新旧动能转换重大战略工程开展科学研究,学思践悟、躬身笃行。
航天技术打造机器人智能感知系统
航天技术 机器人 智能感知系统
2021/1/27
中国航天科工集团二院二部群智感知创新中心的四足机器人智能感知系统研究工作取得突破性进展,可实现基于视觉方案的自主定位与地图构建功能,能在1分钟内对1000平方米区域进行地图构建,具有较高的智能化与实用化水准。

南京信息工程大学计算机与软件学院陈亚当副教授(图)
陈亚当 南京信息工程大学计算机与软件学院 副教授 机器学习 计算机视觉技术
2020/12/24
陈亚当,南京信息工程大学计算机与软件学院,副教授。研究领域:基于机器学习、深度学习的计算机视觉技术研究。科研成果:1.国家自然科学基金青年项目 No.61802197, 2019.1-2021.12, 26万, 主持;2.江苏省自然科学基金青年项目 No.BK20160964, 2016.7-2019.6, 20万, 主持。
复旦大学计算机科学技术学院成功举办多媒体智能感知及应用论坛
复旦大学计算机科学技术学院 多媒体 智能感知 应用论坛
2021/1/14
2020年12月7日,多媒体智能感知及应用论坛在复旦大学计算机科学计算学院成功举办,本次会议首次采用线上形式举办。本次论坛邀请了计算机视觉、多媒体、模式识别领域取得重要成果的研究者。首先,复旦大学计算机科学技术学院党委书记栗建华代表学院致欢迎辞。栗书记在致辞中回顾了复旦大学计算机科学技术学院在人工智能领域的深厚积累和积淀成果,以及近年来学院师生在科研领域所取得的成绩。学院许多教师在上海市计算机学会...