
搜索结果: 1-15 共查到“安装误差”相关记录26条 . 查询时间(0.086 秒)
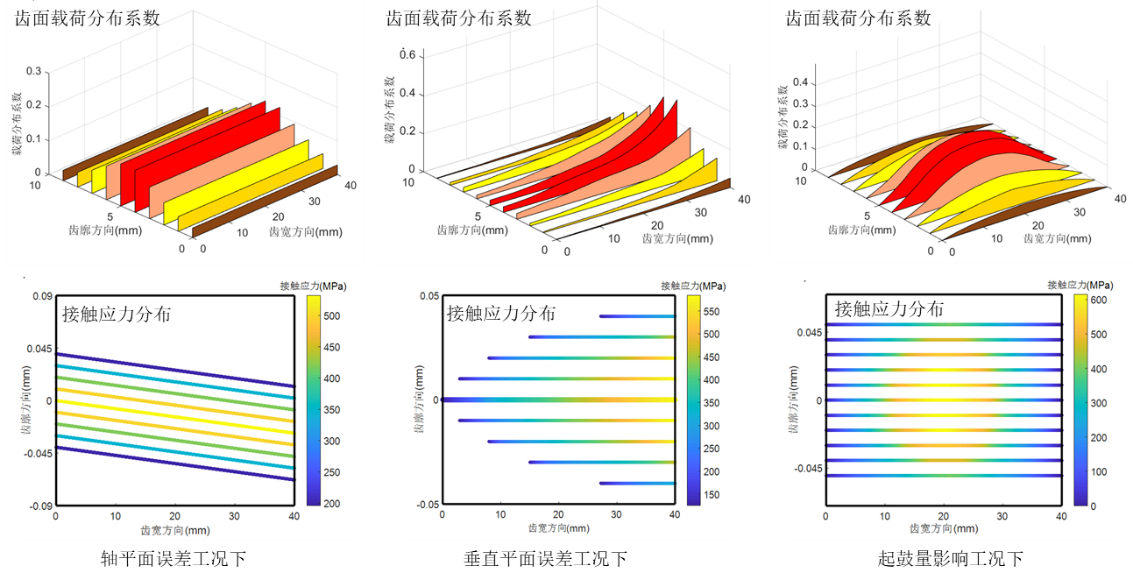
在国家重点研发计划“齿轮传动数字化设计分析与数据平台”项目的支持下,“基于齿轮范成法原理和当前行业最新标准与计算方法”建立修形后直齿的鼓形面数学模型,并根据齿轮接触分析(TCA)结果进行齿面的离散。基于Weber能量法,求解齿间载荷分布,并利用线性规划法,求解齿向载荷分布。在得出齿面的实际载荷分布后,建立鼓形齿面的圆柱体模型。利用赫兹原理,对含安装误差的鼓形齿面进行齿面接触应力分布求解。分析结果发...
双重螺旋法齿面分区修形对降低安装误差敏感性的影响
双重螺旋法 安装误差敏感性 分区修形 齿轮承载接触分析
2019/3/5
为了降低齿轮副对安装误差的敏感性,将双重螺旋法加工的齿面划分为小端、中间接触区和大端3个区域,并沿啮合线方向对3个区域分别进行抛物线修形,得到修形后的理论齿面;采用有约束最小二乘法求得与修形后理论齿面逼近的修形后实际齿面;通过齿轮承载接触分析(LTCA),得到原始齿面与修形后实际齿面在有安装误差时的齿面接触区、接触应力和齿根弯曲应力。研究结果表明:经过分区修形,正、反车齿面最大接触应力降低,齿面接...
为了降低传感器系统误差所带来的影响,首先建立了差速移动机器人里程计系统误差及激光雷达安装误差数学模型.然后,基于拓展卡尔曼滤波算法,提出了一种里程计系统误差及激光雷达安装误差迭代标定方法,该方法能够在定位的同时对2组误差进行实时标定.通过仿真对该方法进行验证,误差估计有效地收敛到误差真值.实物实验中,误差估计能有效收敛,标定后的航迹推算误差大幅度降低.
星敏感器安装误差的三位置法地面标定方法
三位置法 星敏感器 安装误差 三轴精密转台
2016/12/19
针对目前星敏感器安装误差标定过程中存在的标定模型复杂标定测试流程繁琐等问题,提出了一种星敏感器安装误差的三位置法地面标定方法。该方法根据坐标系的欧拉变换,构建了星敏感器安装误差的数学模型;根据误差模型,提出了基于三轴精密转台的安装误差三位置法地面标定策略。采用最小二乘法和三位置法进行仿真对比实验,结果表明,安装误差的三位置法标定结果比最小二乘法标定结果的稳定性提高了近10倍。三位置法还具有标定测试...
提出一种用于井斜测量的自动垂直钻井工具二轴重力加速度计安装误差便捷标定方法,根据空间坐标系转换原理,推导二轴重力加速度计与钻具坐标系数学关系模型,构建安装误差标定矩阵。标定前,保证钻具轴线不变,旋转浮动导向套,测试加速度计输出电压,经处理后作为多元线性回归样本,并利用标定矩阵元素间的数值关系,解算矩阵;标定时,将已解算的标定矩阵和重力加速度在加速度计敏感轴上的分量代入两坐标系数学模型,计算重力加速...
小型编码器动态精度检测的安装误差控制
编码器 动态精度检测 安装偏角 误差控制
2016/9/8
研究了小型编码器动态检测过程中由编码器与基准编码器轴系中心线不完全重合产生的偏角导入的安装误差,以便提高编码器检测装置的准确性和可靠性。分析了安装误差对被检编码器检测精度的影响,推导出了存在安装偏角时引入的安装误差公式及其控制范围公式。为了使编码器的动态检测能准确地反映编码器的实际精度,给出了最大偏角值αmax及高度差Dmax的允许范围。使用现有21位检测装置对15位被检编码器进行了检测实验,分别...
惯性平台自标定中惯性仪表安装误差可观测性分析
可观测性 安装误差 自标定 惯性平台
2016/11/7
针对惯性平台自标定中惯性仪表安装误差可观测性问题,深入研究了系统模型与平台坐标系对惯性仪表安装误差可观测性的影响。根据不同系统动力学模型和观测量构建了四种系统模型。从可观测性定义出发,分析与判断了惯性仪表安装误差在不同系统模型和不同平台坐标系下的可观测性。理论分析和仿真结果均表明惯性仪表安装误差在以下两种情况完全可观:1)观测量为平台框架角和加速度计输出,系统动力学模型为框架角模型,平台坐标系以平...
寄生式时栅安装误差对传感器测量精度的影响
时栅传感器 测角精度 安装误差 Ansoft maxwell 实验验证
2016/3/9
为了提高寄生式时栅行波信号的质量和传感器的测角精度,研究了离散式测头安装误差对传感器测角精度的影响。介绍了寄生式时栅的结构组成和工作原理,建立了三维仿真模型,应用Ansoft Maxwell仿真软件对测头与转子不同间隙、测头的俯仰角和偏摆角大小变化对传感器测角精度的影响进行了仿真实验分析,同时应用84对级的寄生式时栅搭建实验平台进行了实际实验验证。仿真和实验结果显示:安装误差中的间隙、俯仰角、测头...
零飞仪安装误差分析与修正
零飞仪 标校 安装误差 修正
2015/11/3
零飞仪在舰炮武器系统零飞试验安装过程中,因零飞仪摄像头光轴与炮管中心轴线不能完全重合,而导致标定时两中心轴线形成一夹角,由此引入安装误差。针对该问题,分析了该安装误差与标校距离、目标距离的关系,提出了误差修正方法,对零飞仪的安装使用及标校距离的选取具有指导意义。
针对半捷联惯性测量系统中轴向角度安装误差影响系统姿态测量精度的问题,分析了轴向角度安装误差的来源、产生机理及其对姿态测量精度的影响规律,并从理论上推导了其数学表达式。在此基础上,提出了轴向角度安装误差的分级补偿方法。该方法的核心思想是,根据轴向角度安装误差产生的原理和作用机理不同,依次对其补偿。地面实测试验表明,对轴向角度安装误差的补偿方法是正确和有效的,利用该补偿方法可以将轴向角度安装误差引起的...
大口径长焦距测量系统中,为了缩小测量系统的尺寸,加入两块反射镜形成折返光路。折返光路中两块反射镜的安装误差是影响测量结果的重要因素。将条纹理解成条纹成像面上的点光源阵列,通过这一思路分析了反射镜偏转角度对最终检测结果的影响。研究了反射镜偏转角度与反射镜单位法向量的计算公式,结合反射定律的矩阵形式,求出入射光矢量到出射光矢量的变换矩阵。基于反射镜的单位法向量、出射光的方向向量,利用解析几何得到理想接...
电子罗盘安装误差标定与补偿方法研究
地磁导航 电子罗盘 安装误差 标定补偿
2014/4/18
针对地磁导航系统在实际应用中由于电子罗盘安装误差而影响导航系统测量精度的问题,提出了一种有效的标定补偿安装误差角的方法。在分析电子罗盘安装误差角产生机理的基础上,建立了安装误差模型,推导了安装误差角的补偿公式,提出了安装误差角标定方案。通过计算机仿真验证了安装误差角求解算法的正确性。在不同倾角平面上进行了安装误差角标定试验,提出实际操作中对标定平面的要求并验证了补偿结果。
基于某种无陀螺惯性测量单元的安装误差补偿
无陀螺惯性测量单元 加速度计安装误差 标定 补偿
2013/3/19
加速度计的安装误差对无陀螺惯性测量单元的精度影响十分显著。分析了一种典型的九加速度计配置方案,针对其构型特点,讨论了加速度计的安装方向和位置误差,给出了标定方法和误差计算公式,采用总体最小二乘法求解其中的超定方程,并设计了补偿方案。仿真试验结果表明该补偿方案将角速度解算误差的均值和方差均减小2个数量级,消除89.5%的东向导航误差。
转台安装误差对光学捷联惯导标定的影响分析
安装误差 双轴转台 分立式标定 误差分析
2013/4/17
针对双轴转台标定时安装误差对光学捷联惯导标定的影响,推导了双轴转台安装误差与标定参数的数学关系,分析并量化了转台安装水平误差、方位误差对标定结果的影响。得到以下结论:转台安装误差对陀螺标定结果与加速度计零偏标定结果没有影响; 当转台安装水平误差为11'时,加速度计标度因数误差为10-5; 假定加速度计真实失准角为5',转台水平误差为1°,则标定后的加速度计失准角误差仅为0.1″。结论可作为修正双轴...