
搜索结果: 1-15 共查到“传感器技术 机器人”相关记录42条 . 查询时间(0.912 秒)
中国科学院合肥物质科学研究院专利:一种多传感器机器人手爪
中国科学院合肥物质科学研究院 专利 多传感器 机器人手爪
2023/12/20
中国科学院合肥物质科学研究院专利:一种多传感器机器人手爪
中国科学院合肥物质科学研究院专利:机器人手爪仿生指面柔性接触传感器阵列
部分微特电机和传感器产品列入“人形机器人揭榜挂帅任务榜单”
微特电机 传感器 人形机器人
2023/11/12
2023年9月13日,工业和信息化部办公厅发布《关于组织开展2023年未来产业创新任务揭榜挂帅工作的通知》(以下简称:《通知》)。此项工作将围绕元宇宙、人形机器人、脑机接口、通用人工智能4个重点方向,聚焦核心基础、重点产品、公共支撑、示范应用等创新任务,发掘培育一批掌握关键核心技术、具备较强创新能力的优势单位,突破一批标志性技术产品,加速新技术、新产品落地应用。
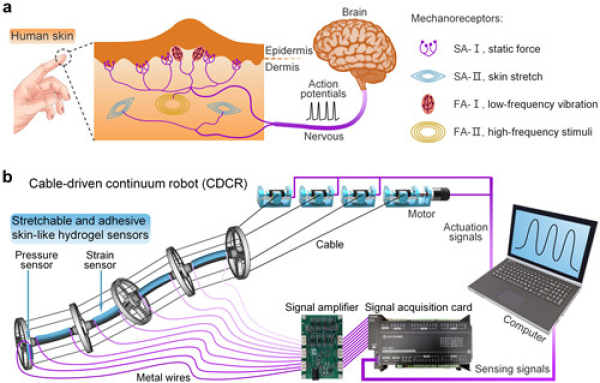
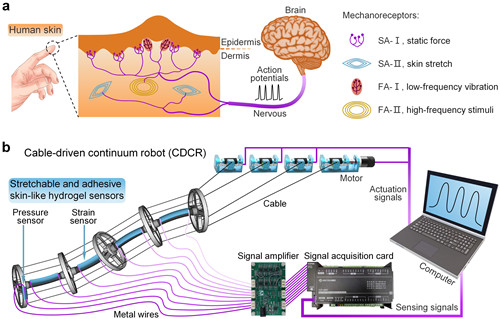
绳驱动连续体机器人(CDCR)是重要的软体机器人,具有结构轻巧、安全和自由度高等特点,能够基于其自身的柔性和可拉伸性产生大幅度弯曲、扭转变形等动作,因此它可在狭窄和复杂的环境中很好地工作。目前,CDCR系统中常用的光纤布拉格光栅传感器模量高、伸长率极低、缺乏粘附机制,限制了软体机器人的运动且易与机器人分层,这使这种刚性的传感器不适合集成系统。如何设计柔性可黏附传感器,用于CDCR的自感知及其运动监...
中科院上海分院宁波材料所在绳驱动连续体机器人感知用类皮肤水凝胶传感器取得进展(图)
宁波材料所 机器人感知 皮肤水凝胶 传感器
2022/12/19
绳驱动连续体机器人(CDCR)是一种非常重要的软体机器人,具有结构轻巧、安全和自由度高等特点,能够基于其自身的柔性和可拉伸性产生大幅度弯曲、扭转变形等动作,因此它可以在狭窄和复杂的环境中很好地工作。然而目前CDCR系统中常用的光纤布拉格光栅传感器模量高,伸长率极低,缺乏粘附机制,极大地限制了软体机器人的运动并容易与机器人分层,这使得这种刚性的传感器不适合集成系统。如何设计柔性可黏附传感器,用于CD...

宁波材料所在绳驱动连续体机器人感知用类皮肤水凝胶传感器取得进展(图)
机器人感知 皮肤 水凝胶传感器
2023/7/13
绳驱动连续体机器人(CDCR)是一种非常重要的软体机器人,具有结构轻巧、安全和自由度高等特点,能够基于其自身的柔性和可拉伸性产生大幅度弯曲、扭转变形等动作,因此它可以在狭窄和复杂的环境中很好地工作。然而目前CDCR系统中常用的光纤布拉格光栅传感器模量高,伸长率极低,缺乏粘附机制,极大地限制了软体机器人的运动并容易与机器人分层,这使得这种刚性的传感器不适合集成系统。如何设计柔性可黏附传感器,用于CD...
让机器人触觉不再生硬,先进机器人团队提出光电式柔性压力传感新思路(图)
中国科学院自动化研究所 机器人 光电 传感
2022/6/22
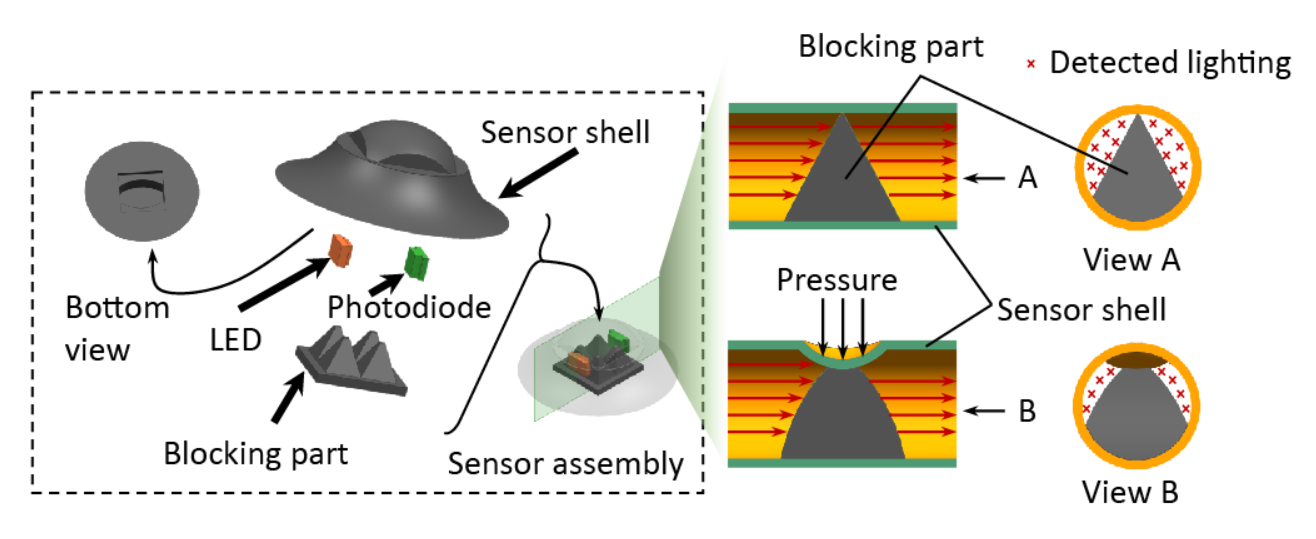
柔性压力传感器可以用于人机交互、软体机器人、康复医疗等领域,是触觉传感器的重要成员之一。然而,现有柔性压力传感器在高灵敏度、高稳定性以及高传感范围等方面仍然存在较大挑战,限制了其在机器人领域的广泛应用。自动化所先进机器人团队程龙研究员等将结构设计与光电原理相结合提出了一种柔性压力传感新思路--基于主动遮挡的光电式压力传感器,该传感器与传统光纤式传感器相比,灵敏度能够提升约一个数量级。
合肥工业大学微电子学院在机器人用柔性多维力传感器领域取得重要进展(图)
合肥工业大学微电子学院 机器人用柔性多维力传感器 Advanced Materials Technologies
2023/1/6
人类皮肤受益于指纹结构和各种机械受体,可以轻易地感受到压力和摩擦力。运用新型力学传感技术提升机器人的触觉智能,使其抓握感知能力达到类似于人手触觉水平,是机器人基础研究领域的一项重要内容。近日,我院刘平副教授提出了一种用于检测法向力与切向力的谐振式柔性触觉传感器,装备了该传感器的灵巧手能够在抓取过程中对材质进行识别,准确率达92.5%。相关成果以“Flexible and wireless norm...
水火相融!我国实现机器人水下火炬接力
水下机器人 水下火炬接力 精准对接 动力稳定性
2022/3/2
2022年2月4日,北京冬奥会如约举办。开幕式上视听盛宴,赛中众多监测仪器护航运动员安全,技术成为“简洁、安全、精彩”的通道。值得一提的是,本届冬奥会还实现了多个首次,其中一项成果曾被用于火炬传递中。2月2日,在北京冬奥公园举行的冬奥火炬传递活动中,由沈阳自动化所牵头,联合北京动力机械研究所、广东智能无人系统研究院等单位联合研制水下机器人,实现水下火炬接力,并在25天的时间里开展了近百次的测试,进...

2021年8月16日,《自然・生物医学工程》(Nature Biomedical Engineering)在线发表了上海交通大学机械与动力工程学院机器人研究所朱向阳、谷国迎教授和麻省理工学院赵选贺教授的合作论文“操作感知一体化的软体神经假肢手”(A soft neuroprosthetic hand providing simultaneous myoelectric control and ta...

近日,上海交大机械与动力工程学院机器人研究所朱向阳教授、谷国迎教授团队联合美国卡耐基梅隆大学的Carmel Majidi教授在Advanced Materials期刊上提出了一种高灵敏的柔性离子凝胶压感皮肤,利用超高电容机理,实现了超宽的压力检测范围、快速响应时间、高电容基线(nF-μF级)和高信噪比,在生理信号监测、多点传感阵列、残疾人软体假肢手触觉反馈等领域取得了实际应用。论文“Cutaneo...

中国科大在软体机器人领域取得重要进展(图)
软体机器人 传感器
2022/11/20
2021年4月15日,中国科学技术大学科研部计算机学院陈小平教授团队在机器人领域知名期刊《The International Journal of Robotics Research》(IJRR)在线发表了题为“Hierarchical Control of Soft Manipulators towards Unstructured Interactions”的研究论文。
新型光学传感器为机器人技术和图像识别人工智能提供支持
光学传感器 视网膜形态传感器 机器人技术 图像识别
2022/3/2
美国俄勒冈州立大学在新型光学传感器研发上取得重大进展。他们开发出一种新型光学传感器,可更逼真地模仿人眼感知物体变化的能力。这一成果有望带来图像识别、机器人技术和人工智能等领域的重大突破。光学传感器是一种传感器,是依据光学原理进行测量的,它有许多优点,如非接触和非破坏性测量、几乎不受干扰、高速传输以及可遥测、遥控等。
激光位移传感器为何称为机器人的“眼睛”?
激光位移传感器 测量精度 激光三角测量法 激光回波分析法
2022/3/2
激光位移传感器可以测量位移、厚度、振动、距离、直径等精密的几何测量。激光有直线度好的优良特性,同样激光位移传感器相对于我们已知的超声波传感器有更高的精度。但是,激光的产生装置相对比较复杂且体积较大,因此会对激光位移传感器的应用范围要求较苛刻。
杭州电子科技大学自动化学院、杭电圣光机智能系统和机器人研究中心2021年硕士研究生同等学力加试数据结构考试大纲
杭州电子科技大学自动化学院、杭电圣光机智能系统和机器人研究中心 2021年 硕士研究生 同等学力 加试 数据结构 考试大纲
2020/9/18
杭州电子科技大学自动化学院、杭电圣光机智能系统和机器人研究中心2021年硕士研究生同等学力加试数据结构考试大纲。