
�������: 1-15 ���鵽����ѧϰ����ؼ�¼50�� . ��ѯʱ��(0.138 ��)
Ϊ�˿˷���ͳ����ģʽ������(Central pattern generator,CPG)�ؽڿռ���Ʒ����ĸ����Ժ;�����,���Ļ�����ѧϰ����ģʽ������ģ��,�����һ�����ߵ��ƺ��ں϶ഫ������Ϣ�ķ��˻����˻�������Ӧ���߿��Ʒ���.�㷨�ѵ���������ڻ����˵Ĺ����ռ佫��ѧϰCPG���ڹ����ռ�켣����,��ʹCPG����ֱ�ӺͲ�̬ģʽ�����.���������������ѧϰCPG��ѧϰ��ʵʱ���ɻ��������Ĺ켣�ͽ��ƹ켣...

������ѧ����ѧԺ�������Ŷ�������ѧϰϵͳʵ�ֱƽ����ۼ��Ĺ�ѧ���Բ�����ƣ�ͼ��
������ѧ����ѧԺ ������ ��ѧϰϵͳ �ƽ����ۼ��� ��ѧ���� �������
2019/12/16
����������ѧ�ķ�չ�����г�ӱ���ʵ��˹��ṹ�������ڶ��о��ߡ���������������о��������������ѧ����ѧԺ�������о�Ա�����о��Ŷ�ʵ����һ����Ǣ�Ŀ�ܡ���BoNet�����ϱ�Ҷ˹�Ż���Bayesian optimization���;��������磨convolutional neural network����ʵ�������ṹ���ڳ�ǿ��ѧ���Ե���ѧϰ�����ڴ˿�ܣ����ǽ����ṹ��Ʊ�ʾΪͼ�Σ����������...
��ѧϰ���ؿ��巽�� -- ͨ����ȡ����ϵͳ������Чģ�͵���ѧϰ���̣���Ƴ��Ż��ĸ��·������˷����Ӷ���ϵͳ���ؿ���ģ�����ٽ������ͽ��ո��ʵ͵�ƿ��- - ��2016������������Ѿ�������̬���Ӷ������������ٽ������о���ȡ�ò�����Ҫ�ɹ����ܵ��㷺��ע[1]���÷��������Ӷ���������ģ��ֵ���������е�Ӧ�ã�����������[2, 3]��������ʯīϩ�����������ħ��ʯīϩ��ϵ���µ�ʵ��������ӿ�֣����Ƕ�...

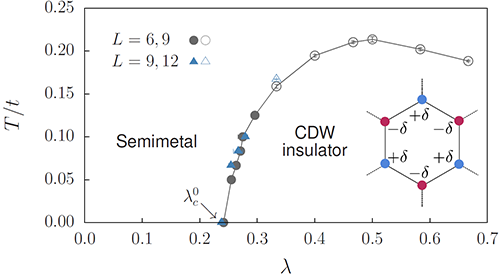
��ǰ���й���ѧԺ�����о���/��������̬���������о����IJ�ʿ���´����о�Ա����������ۿƼ���ѧ��������ʿ���¹�ά���ȱ���ѧ Martin Hohenadler ��ʿ��ɵ��о��Ŷӣ�������ѧϰ���ؿ��������ʱ�����ؿ��巽�����о���ʯīϩ���Ѿ����ϵ�������� Holstein ģ�͵���ͼ����ȷ�̻���������µĵ����˷����ӴӰ������������ϵ��µľ�Ե��������̣�Ϊ��������˰����������ṩ���µ�˼·��...
�ֲ�Լ������ѧϰú��ʶ��
ú��ʶ�� �������� ��ѧϰ �ֲ�Լ��
2018/12/25
���ѵ��������������µ�ú��ͼ��ʶ�����⣬�����һ�־ֲ�Լ������ѧϰ(LCSL)ú��ʶ�����÷������ȴӸ���������ͨ���ֲ�Լ�����ֵ��Ż�ģ�ͻ�ȡ�߲�ṹ��������Щ�����������ޱ�ǩ�ķ�ú����Ȼͼ����ú��ͼ��������ֲ���ͬ���Ҹ�����ȡ;Ȼ������ѧϰ�ĸ߲�ṹ������Ͼֲ�Լ�����Ա�����ȡú��ͼ������;�������SVM�㷨��ú��ͼ����з���ʶ��ʵ�����:ͨ���÷����õ��������ܹ���Ч�ر���ú��ͼ��...
���ؿ��巽����Monte Carlo method����Ҳ��ͳ��ģ�ⷽ�����Ƕ�ʮ������ʮ����������ڿ�ѧ�����ķ�չ�͵��Ӽ�����ķ���������������Ը���ͳ������Ϊָ����һ��dz���Ҫ����ֵ���㷽��������һ��������̬����ϵͳ�����ؿ�������Ч�ʺܵͣ��������ٽ�㸽�����ٽ����������������и��Ӷ����Ա����ĵ��ܹ��ͣ�Ҳ������ɫ�ӡ�������ϵͳ�ж�������õ��µļ��㸴�Ӷ�������������Щ���ʹ����ͨ�����ؿ���...
�о�����Ӳ�����ϵ�����Ԫ���ֱ������������ͨ��̽����ɨ����ͬһ�����˴˴�λ����Ԫ���صĶ�֡ͼ����Ϊѵ������������ͼ��;Ȼ����Դ�ͳ�ľֲ�����Ƕ��(LLE)ʵ��ѧϰ���ֱ��㷨���������ⲿѵ������,�����ڹ�����ϵͳֱ�Ӵ�����ȱ��,�����һ�ֻ�����ѧϰ�ĸĽ�LLE�㷨;�����µ�LLEȨֵ���㷽���������Ȩֵ,ͬʱ�Գ�ʼ�����ٴ�������ѧϰLLE�����ָ���ʧ�ĸ�Ƶϸ����Ϣ������ʵ��������,���㷨��...
����������ѧϰ��ҳ�����
������ ���ʹ�ϵ ������ҳ ��ҳ����
2014/10/13
�����һ����ѧϰ����������ҳ�����SLW��SLW�״������˷��ʹ�ϵ�ĸ��ʹ����з�������ѧϰ���ص㡣SLW�����еĶ�����ҳ���ϳ������Զ����ֿ��Ŷȵ͵��û��Ͷ�Ӧ�ķ��ʹ�ϵ���Ӷ���һ�����õͿ��Ŷ��û���������ҳ�ķ��ʹ�ϵ������δ֪�Ķ�����ַ���ϡ�ʵ��������������ͬ���ݼ��ϣ�����ڴ�ͳ��ⷽ����SLW��������������߶�����ҳ���Ч�����������ƽ�����ʱ�䡣
����ʵ��ʶ������Ϣ��ȡ�е�һ�����������������÷ḻ��δ��ע���������ʵ��ʶ���ָ���Ǹ�����һ����Ҫ���о�������������������һ�ֽ�����ѧϰ����ѧϰ���ϵķ�������SACRF��ͨ���������ŶȺ�����2-GramƵ����ֵ��ѡȡ�������������˹����Զ����ϵķ�ʽ���б�ע����չѵ�����ϡ�ʵ��������÷��������ʵ��ʶ��ľ�ȷ�ʺ��ٻ��ʵ�ͬʱ���ܹ������ؽ����˹���ע�Ĺ�������
����ʵ��ʶ������Ϣ��ȡ�е�һ�����������������÷ḻ��δ��ע���������ʵ��ʶ���ָ���Ǹ�����һ����Ҫ���о�������������������һ�ֽ�����ѧϰ����ѧϰ���ϵķ�������SACRF��ͨ���������ŶȺ�����2-GramƵ����ֵ��ѡȡ�������������˹����Զ����ϵķ�ʽ���б�ע����չѵ�����ϡ�ʵ��������÷��������ʵ��ʶ��ľ�ȷ�ʺ��ٻ��ʵ�ͬʱ���ܹ������ؽ����˹���ע�Ĺ�������
������ѧϰϡ���ʾ�Ķ�̬����ʶ��
����ʶ�� ϡ���ʾ �ֵ�ѧϰ ���ٶȴ�����
2014/3/21
��Լ��ٶȴ����������Ʋɼ���ʽ���һ�ֻ�����ѧϰϡ���ʾ�Ķ�̬����ʶ�����÷���������ʶ������ת��Ϊ����ʶ����������ѵ��������ϡ���ʾ���⣬ֱ�Ӷ�ԭʼ���ٶ��źŽ��в�����ʡȥ��������ȡ���̣��ɷ���������µ���������ɾ�����е���������������������ֵ�ѧϰ����Ѱ��һ����С�IJ������Ż��ij��걸�ֵ��������ʶ��������ϡ���ʾ���Ӷ���������㷨�ļ��㸴�Ӷȣ�����ʵʱ��Ҫ���ڰ���18�����Ƶ�3 0...
��Ե綯����ģ�����Ķ�������˶�����Ķ������ػ�����Ӱ��ϵͳ���غ����پ��ȵ����⣬����ǰ �����ƶԶ������ؽ��в��������ƣ������ʹ��һ�ֻ���BP �������PID ������ѧϰ�����㷨��ʵ�ָ߾��ȸ� ���غ��ķ����������˵綯����ģ�����ڱ���ʽ�����ж������صIJ�����Ӱ�죬���ڽṹ������ԭ����ʹ��ǰ�� ���ƶԶ���ٶȸ��Ž��в����������ƶ������أ���ǰ���������ƶ������صĻ����ϣ�������ͳPID �㷨��...
��Բ��걸�ռ���ϵͳ, ���һ�ֻ�����ѧϰ���������˲���(SLSPF) �Ľ�����Ϸ���. ������ѧϰ��������, ������ѧϰ��ʱ����ָ������, ���������˲�����ת�Ƹ��ʵ�����; �����ѧϰ��������ϵĶ�̬������ʽ����ģʽ�ռ�, ʹ�����˲���������������̬����; ͬʱ�����˲��걸��Ϣ�ռ����ʵģʽ��δ֪ģʽ��ֵ�ľ�������. ʵ��������, �����ڸ�ά״̬�ռ���, SLSPF �������Ա�֤�����˲���...
ѹ�����ܽṹģ����ѧϰ����(FSLC)
ѹ�����ܽṹ ���� ģ������ ѧϰ����
2014/5/20
��ģ������ѧϰ���ƵĻ���˼������,���ݿ���ϵͳ�Ķ�̬�������,����ģ�����ƶ�ѧϰ�������еIJ�������ʵʱУ��,ʵ��ϵͳ�Ķ�̬ѧϰ����,�����һ��������ѹ�����ܽṹ���Ƶ�ģ����ѧ���Ʒ���FSLC(Fuzzy Self-Learning Control)���ֱ������ά8�ڵ�ʵ�嵥Ԫ(Solid45)����ϵ�Ԫģ�����ṹ��ѹ���¶���/������,����ANSYS���������Ա�д��ѹ�����ܽṹ���Ʒ�����...
��ԷǾ�������ܶȾ������⣬���̿ռ��������۳��������һ�ֶ�������ѧϰ�����㷨 (multi-granularity self��learning clustering algorithm�� MSCA)���㷨ͨ������ۺ����ṹ�Ͷ������Ⱥ��������������⣬����ÿ��ۺϹ����и��ݾۺ���������ѧϰ�ķ�ʽ��̬ȷ���ۺ����ȣ�����˴�ͳ�����㷨�ӷǾ�������ܶ����������õ���ͬ��εľۺ������Ҳ����Ծ���������...
�й��о����������а�-��
- ���ڼ���...
�й�ѧ���ڿ����а�-��
- ���ڼ���...
�����ѧ���л������а�-��
- ���ڼ���...
�й���ѧ���а�-��
- ���ڼ���...
�ˡ���-ƪ
- ���ڼ���...
�Ρ���-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
�������� -ƪ
- ���ڼ���...
֪ʶҪ��-ƪ
- ���ڼ���...
���ʶ�̬-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
ѧ��ָ��-ƪ
- ���ڼ���...
ѧ��վ��-ƪ
- ���ڼ���...