
搜索结果: 1-15 共查到“自主可控”相关记录24条 . 查询时间(0.167 秒)

2023年12月8日,由中国计算机学会(CCF)主办,CCF无锡活动中心、江南大学人工智能与计算机学院、无锡学院共同承办的第十四届“太湖论坛―自主可控算力与人工智能大模型发展大会”在江苏无锡太湖皇冠假日酒店成功举办。CCF高性能计算专委会、教育部人工智能国际合作联合实验室、江苏省计算机学会系统结构专委会、江苏省模式识别与计算智能工程实验室、江苏省人工智能国际合作联合实验室为本次大会提供了技术指导。
国家能源局:提升能源产业链自主可控水平补齐产业链短板
国家能源局 能源供应 中国石油
2023/7/13
“去年以来,在全球能源供应紧张的形势下,我国能源供给能力和质量持续提升,实现了能源供应的量价齐稳。”7月4日,国家能源局微信公众号消息显示,国家能源局党组书记、局长章建华近日接受媒体采访时表示,未来一段时间,能源消费还将保持刚性增长,新能源安全替代能力还未完全形成,能源绿色低碳转型任务艰巨;部分能源技术装备尚存短板;极端天气、网络攻击等非传统安全风险影响日益凸显,给能源安全保障带来了多重压力。

中国原子能科学研究院实现大面积、低功耗、高位置灵敏探测器自主可控(图)
微结构探测器 光刻一体化 自主可控
2023/5/29
近日,中国原子能科学研究所核物理研究所团队解决多项“卡脖子”技术难题,实现了大面积、低功耗、高位置灵敏光刻一体化微结构探测器的自主可控。团队自主研发的多个探测器和电子学线路板样件主要参数达到国际同类产品的最高水平,对核探测器及核电子学创新发展具有重要价值,研究成果已应用于国内外多个科研项目。
“半山一号”核心控制设备实现自主可控
半山一号 重型燃机 静止变频器 燃机核心控制
2023/5/24
我国首台9FA级重型燃机“半山一号”机组完成静止变频器(SFC)改造后已成功快速启动数十次,标志着燃机核心控制设备SFC实现自主可控。
打造自主可控、安全可靠、竞争力强的现代化产业体系
现代化产业体系 新发展格局 现代化经济体系
2023/3/30
习近平总书记在中共中央政治局第二次集体学习时强调新发展格局以现代化产业体系为基础,要求打造自主可控、安全可靠、竞争力强的现代化产业体系。在当今世界百年未有之大变局加速演进、我国迈入全面建设社会主义现代化国家新征程的大背景下,加速打造现代化产业体系,不断提升产业基础能力和产业链现代化水平,加快培育具有国际竞争力的战略性新兴产业和产业集群,形成创新能力强、完整有韧性的产业链供应链,对全面建成社会主义现...
2022年6月25日,由南开大学经济与社会发展研究院白雪洁教授担任首席专家的国家社会科学基金重大项目“大国经济条件下构建自主可控的现代产业体系重大问题研究”开题报告会在经济与社会发展研究院以线下线上相结合的形式举行。
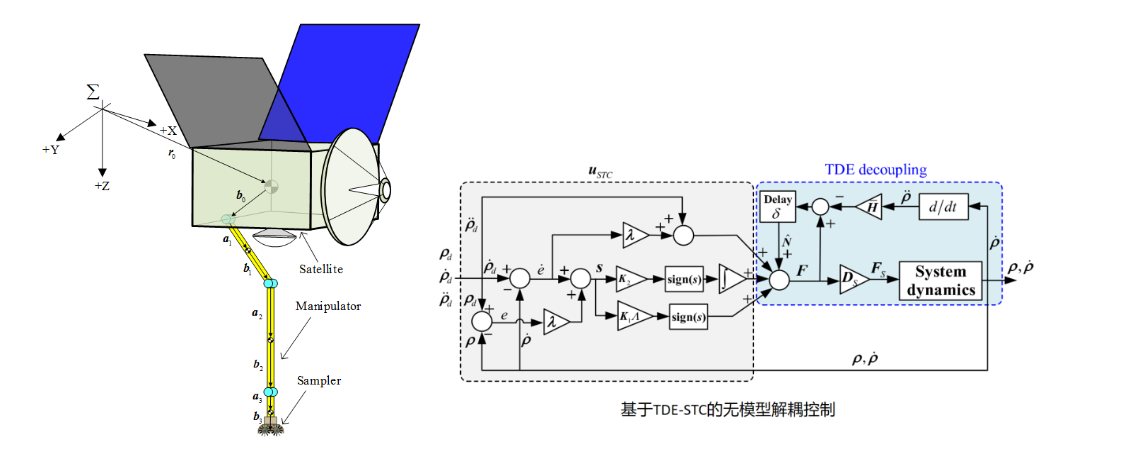
2022年1月,中国科学院沈阳自动化研究所在空间机器人自主操控方面取得了新进展,针对航天器平台和机械臂的动力学耦合提出了一种基于时延估计的无模型解耦控制算法,相关成果以论文形式(Attitude Decoupling Control of Semifloating Space Robots Using Time-Delay Estimation and Supertwisting Control)...
自主可控磁共振设备进驻中山瑞金两家医院
磁共振设备 中国高端医疗装备行业 数字诊疗装备研发专项
2022/3/17
2021年7月1日,中国自主可控超高场强转化医学双子星“14.4T”分别进驻顶尖名院――全球首款人体全身5.0T磁共振uMR Jupiter进驻复旦大学附属中山医院,正式进入临床试验阶段;中国首台超高场动物(临床前)磁共振 uMR 9.4T进驻上海交通大学医学院附属瑞金医院,进行临床前应用研究合作。

国内首套自主可控重型燃气轮机控制系统投运(图)
首套 自主可控 重型燃气轮机 控制系统
2021/6/4
2021年5月25日9时25分,国内首套自主可控重型燃气轮机控制系统(TCS)在华电龙游电厂成功并网投运,标志着中国华电在国内率先完整掌握了重型燃气轮机控制系统的自主设计、生产、调试、改造等全过程关键技术,推动了我国燃气轮机的国产化发展。
自主可控区块链软硬件一体技术体系“长安链”应用场景已经涵盖食品追溯、供应链金融、碳交易等领域。这是中国内地自主研发的首个自主可控区块链软硬件一体技术体系并在北京得到深度应用。“长安链”基于自主可控的区块链专用加速芯片和运算速度全球领先达每秒10万笔以上的区块链底层软件平台,实现了“长安链”运算速度和安全性双升高。
刚刚闭幕的中央经济工作会议提出了明年党和政府要抓好的一系列重点任务,其中就当下舆论高度关注的我国产业链供应链安全和稳定问题,提出“增强产业链供应链自主可控能力”,这是一项极为重要的战略决策。深刻认识和把握这一决策,对于提高贯彻和落实中央决策的自觉性和主动性,确保我国产业链供应链稳定和安全,具有十分重要的指导意义。

中国科学院上海微系统与信息技术研究所成功研制自主可控的AIGaAs PIN 异质结毫米波单片开关芯片(图)
中国科学院上海微系统与信息技术研究所 自主可控 AIGaAs PIN 异质结 毫米波 单片开关芯片
2020/8/11
上海微系统所孙晓玮研究员团队联合杭州芯影科技有限公司、福联集成电路有限公司研制成功自主可控的AlGaAs PIN 异质结毫米波单片开关芯片,实现了国外同类产品的一对一替代。单刀双掷(SPDT)、单刀四掷(SP4T)的芯片,各项指标达到或各别指标优于国外同类芯片指标。特别是国内首次研制成功了自带偏置的同类型开关芯片。毫米波PIN开关具有切换时间短、隔离度高、插损小等特点,在毫米波成像仪、宽带开关阵列...
一支只有30多人,平均年龄不到30岁的科研团队,5年打造出天通一号卫星移动通信系统终端核心芯片组,打破了国外对卫星移动通信领域核心芯片技术的垄断,更助力中国卫星移动通信实现自主可控。近期,该项目获得河北省科学技术进步奖一等奖。“这是国内卫星通信领域第一套芯片,从材料到设计,再到制造工艺,完全自主可控。”该团队负责人、中国电子科技集团公司第五十四研究所卫星通信与广播电视专业部副主任王艳君说。

中国科学院沈阳自动化研究所空间机器人自主操控技术研究取得进展(图)
空间机器人 自主操控 捕获能力
2021/8/20
在强辐射、超低温、高真空、微重力的太空环境中,空间机器人可以代替或协助航天员去执行空间任务;与航天员就位作业相比,空间机器人在成本、安全性以及作业时间等方面具有明显优势。机器人自主操控技术是空间机器人研究需要解决的核心技术。以空间自由移动目标的在轨服务为例,目标可靠捕获是后续操作任务的技术基础。
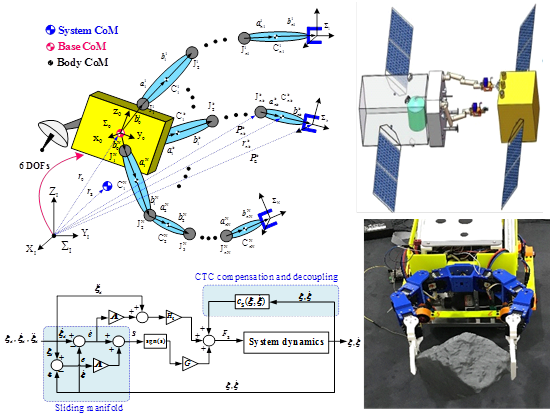
近日,机器人学国家重点实验室、中科院“空间自主操控创新交叉团队”的研究人员,针对不具备抓捕特征的空间非合作目标,提出了一种机器人化“锁笼对”的捕获方法,相关成果发表于机械电子领域顶级期刊IEEE/ASME Transactions on Mechatronics (DOI: 10.1109/TMECH.2019.2952552)。 在强辐射、超低温、高真空、微重力的太空环境中,空间机器人可以代替或...