
搜索结果: 31-45 共查到“控制理论”相关记录2671条 . 查询时间(0.428 秒)
一种鲁棒的基于对抗结构的生物特征ROI提取方法
感兴趣区域提取 语义分割 对抗结构 生物特征
2024/1/17
感兴趣区域(Region of interest,ROI)提取在生物特征识别中,常用于减少后续处理的计算消耗,提高识别模型的准确性,是生物识别系统中预处理的关键步骤.针对生物识别数据,提出了一种鲁棒的ROI提取方法.方法使用语义分割模型作为基础,通过增加全局感知模块,与分割模型形成对抗结构,为模型提供先验知识,补充全局视觉模式信息,解决了语义分割模型的末端收敛困难问题,提高了模型的鲁棒性和泛化能力...
同义词挖掘是自然语言处理中一项重要任务.为了构建大规模训练语料,现有研究利用远程监督、点击图筛选等方式抽取同义词种子,而这几种方式都不可避免地引入了噪声标签,从而影响高质量同义词挖掘模型的训练.此外,由于大量实体词所具有的少样本特性、领域分布差异性和预训练词向量训练目标与同义词挖掘任务的不一致性,在同义词挖掘任务中,词级别的预训练词向量很难产生高质量的实体语义表示。

安徽工业大学计算机科学与技术学院纪平副教授(图)
安徽工业大学计算机科学与技术学院 纪平 副教授 智能控制技术
2023/6/5
纪平,毕业于合肥工业大学,曾任马钢电讯市场部经理。曾获优秀青年、“双佳”最佳个人、科技先进个人、跨世纪技术人才(“六十人”)、本科生优秀指导教师等荣誉。主持马钢通信网络多项重大工程、省级MOOC等项目,编写规划教材多部,指导学科竞赛获省级和国家级奖项多项。
This paper is concerned with the adaptive consensus tracking control problem for strict-feedback nonlinear multiagent systems with parameter uncertainty under both fixed and switching topologies. When...
一种新的分段式细粒度正则化的鲁棒跟踪算法
视觉跟踪 孪生网络 细粒度正则化 组套索
2024/1/17
孪生网络跟踪算法在训练阶段多数采用L2正则化,而忽略了网络架构的层次和特点,因此跟踪的鲁棒性较差.针对该问题,提出一种分段式细粒度正则化跟踪(Segmented fine-grained regularization tracking,SFGRT)算法,将孪生网络的正则化划分为滤波器、通道和神经元三个粒度层次.创新性地建立了分段式细粒度正则化模型,分段式可针对不同层次粒度组合,利用组套索构造惩罚函...
Academy of Mathematics and Systems Science, CAS Colloquia & Seminars:Robust Generalization Requires Exponentially Large Models
鲁棒泛化 指数级大 模型
2023/5/15
It is well-known that modern neural networks are vulnerable to adversarial examples. To mitigate this problem, a series of robust learning algorithms have been proposed. However, although the robust t...
中国科学院工程热物理研究所专利:离心式压缩机的启动控制装置及方法

上海交通大学自动化系博士生导师李贤伟副教授(图)
上海交通大学自动化系 博士生导师 李贤伟 副教授 鲁棒控制
2023/5/9
李贤伟,上海交通大学自动化系博士生导师、副教授。研究方向:鲁棒控制理论,网络化控制理论,多智能体控制理论。承担项目:国家自然科学基金面上项目:具有时/空稀疏通信的多智能体输出反馈协同控制研究(2022,54万),上海市自然科学基金面上项目:基于边事件触发机制的多智能体协同控制(2021,20万),国家自然科学基金青年项目:线性多智能体系统的自适应事件触发协同控制(2020,26万)等。
Academy of Mathematics and Systems Science, CAS Colloquia & Seminars:含任意未知输入下的状态估计与参数辨识
任意未知输入 状态估计 参数辨识
2023/5/10
现存的含未知输入系统的卡尔曼滤波方法假设噪声协方差矩阵已知而且要求系统强可观。针对实际中广泛存在的不精确知道噪声协方差矩阵或系统非强可观的情况,如何在工程应用如机器人定位中实现卡尔曼滤波是一个重要且亟需解决的难题。本报告中,报告人将探讨含未知输入滤波领域的研究现状,并以基于相关性的方法为典型,讨论含未知输入下噪声协方差矩阵的可辨识性问题。如果时间允许,报告人也将探讨其在机器人智能感知与决策方面的一...
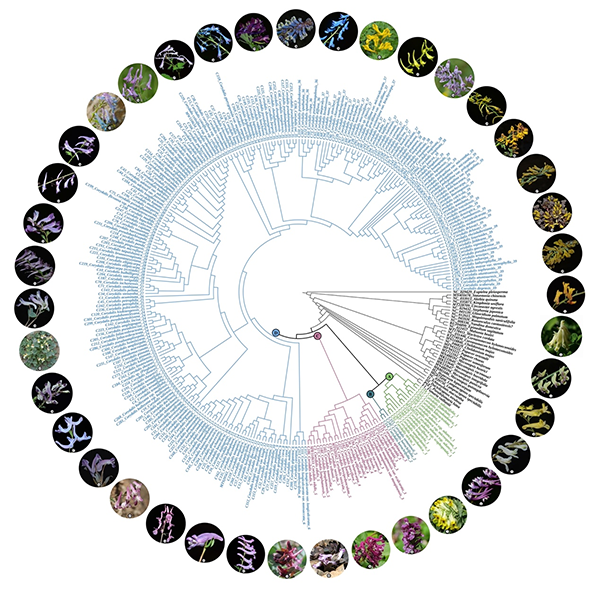
中国科学院昆明植物所在超高多样化类群的系统演化方面获进展(图)
昆明植物所 多样化类群 系统演化
2023/5/7
快速辐射类群因在年轻的生物多样性热点地区的进化、适应和环境变迁研究中的潜在价值而备受关注,也是解决生命之树问题的最大挑战之一。紫堇属Corydalis是罂粟科中超高多样化的属(约530种),主要分布于北温带,以青藏高原-横断山区为主要辐射分化中心。长期以来,关于紫堇属的系统发育研究往往基于个别叶绿体基因片段和少数类群取样,未能很好解决本属内的组间系统发育关系,且所提出的亚属级和组级分类系统存在争议...
软体机械臂水下自适应鲁棒视觉伺服
软体机器人 自适应鲁棒控制 无标定视觉伺服 水下视觉伺服
2024/1/17
水下仿生软体机器人在水底环境勘测,水下生物观测等方面具有极高的应用价值.为进一步提升仿章鱼臂软体机器人在特殊水下环境中控制效果,提出一种自适应鲁棒视觉伺服控制方法,实现其在干扰无标定环境中的高精度镇定控制.基于水底动力学模型,设计保证动力学稳定的控制器;针对柔性材料离线标定过程繁琐、成本高,提出材料参数自适应估计算法;针对水下特殊工作条件,设计自适应鲁棒视觉伺服控制器,实现折射效应的在线补偿,并通...

中国科学院软件所在复杂背景下雷达目标检测方面取得进展.(图)
雷达目标检测 智能检测 鲁棒性鲁棒性
2023/8/20
2023年4月17日,软件所天基综合信息系统重点实验室研究团队在复杂背景下的雷达目标检测方面取得了进展。研究论文《基于对比学习的航海雷达目标检测方法》在《电子学报》上发表,第一作者为博士生司凌宇,通信作者为助理研究员强文文。论文针对航海雷达目标检测中背景复杂、原始数据量大、有效数据量少以及检测任务困难等问题,提出了一种全新的基于对比学习的航海雷达目标检测方法(CLMRD,即Contrastive ...
一种基于解耦控制的智能喷氨优化策略的应用与研究(图)
解耦控制 喷氨优化 应用与研究
2023/5/19
受取样系统、测量仪表等影响,传统喷氨控制自动投入效果难以保证,投自动后脱硝出口NOx波动大,究其原因:被控对象(脱硝装置)呈大滞后特性,且具有非线性及时变性特征,以及烟气取样分析不具有代表性。
Academy of Mathematics and Systems Science, CAS Colloquia & Seminars:Strichartz estimates for wave equations with a potential in non-trapping exterior domains
斯特里查茨估计 非陷阱外域 波动方程
2023/4/14
Consider the linear wave equations with a potential outside a compact set with a non-trapping boundary condition. Assuming that the potential satisfies an appropriate decreasing condition and that zer...
中国科学院声学研究所专利:一种欠驱动无人车的编队控制方法及系统