
搜索结果: 1-12 共查到“磨抛”相关记录12条 . 查询时间(0.134 秒)

沈阳自动化所在复杂曲面机器人自动化磨抛加工领域取得新进展(图)
机器人自动化 磨抛加工 航空发动机
2023/8/22
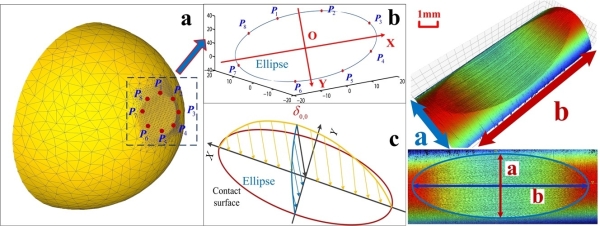
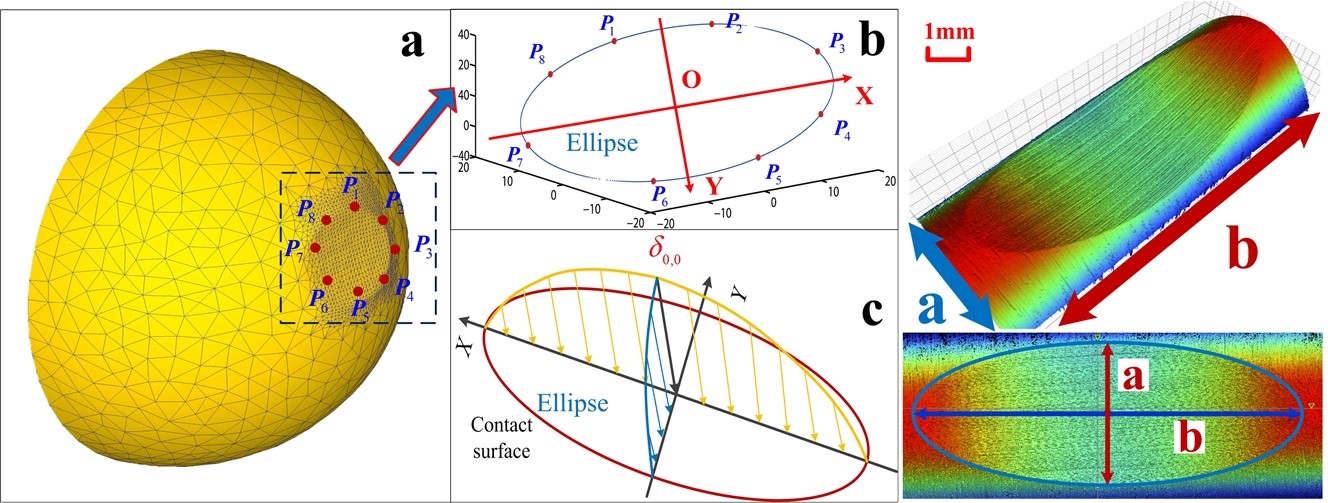
2023年6月1日,中国科学院沈阳自动化研究所在复杂曲面机器人自动化磨抛加工领域取得新进展,提出了一种基于六点定位原理的叶片坐标系自动标定方法,实现了航空发动机叶片磨抛加工过程中动态工件坐标系的自动标定。该研究成果于2023年6月1日在线发表在计算机/制造领域期刊Robotics and Computer-Integrated Manufacturing。

浙江杭机股份有限公司(简称“杭机股份”)研发的大口径光学元件超声铣磨抛成套装备,采用桥式框架移动式结构布局,具有高刚性、高精度及强大的多手段揉合功能,配置超精密闭式静压回转工作台,可自由统配超精密静压主轴、超声刀柄、磨抛头、应力盘、磁流变组合及摇臂式轮廓度仪等关键部件,设备配置有寻边定位系统,可快速定位光学元件坐标,提高工作效率。设备可对3米级光学元件进行超精密铣磨加工、多自由度快速研抛及高精度测...
中国科学院宁波材料技术与工程研究所在磨抛机器人方面取得进展
磨抛 机器人 力控 末端执行器
2023/3/27
磨抛是典型的连续接触式操作,力控技术直接影响磨抛效率和质量,因而至关重要。传统上,一般采用基于机器人关节力矩的直接力控方法,存在力控精度低、动态响应慢等缺点。而机器人加力控末端执行器的间接力控方法采用了宏微系统结构,在小范围内动作时只需调整力控末端执行器的位姿即可,避免了宏机器人大惯性动作对力控精度和动态响应的影响,可有效解决直接力控方法存在的问题。目前,虽然有研发机构或公司研制了力控末端执行器,...
宁波材料所在磨抛机器人方面取得进展(图)
磨抛机器人 系统结构 氮气弹簧
2023/7/13
磨抛是典型的连续接触式操作,力控技术直接影响磨抛效率和质量,因而至关重要。传统上,一般采用基于机器人关节力矩的直接力控方法,存在力控精度低、动态响应慢等缺点。而机器人加力控末端执行器的间接力控方法采用了宏微系统结构,在小范围内动作时只需调整力控末端执行器的位姿即可,避免了宏机器人大惯性动作对力控精度和动态响应的影响,可有效解决直接力控方法存在的问题。目前,虽然有研发机构或公司研制了力控末端执行器,...

2022年11月23日,2022世界智能制造大会发布了“2022世界智能制造十大科技进展”“2022中国智能制造十大科技进展”共20项智能制造科技成果。其中,中国科学院沈阳自动化研究所“变刚度薄壁复杂曲面零件机器人智能磨抛”技术入选“2022中国智能制造十大科技进展”。
机器人自动化航空叶片磨抛加工研究获进展(图)
机器人 自动化 航空叶片 磨抛加工
2022/9/21
近日,中国科学院沈阳自动化研究所在机器人自动化航空叶片磨抛加工领域取得新进展,提出了一种非线性材料去除深度理论模型,实现了机器人自动化航空叶片磨抛加工过程中的逐点精准材料去除控制策略。相关研究成果发表在Journal of Manufacturing Processes上。
2022年4月,中国科学院沈阳自动化研究所在机器人自动化航空叶片磨抛加工领域取得新进展,提出了一种非线性材料去除深度理论模型,实现了机器人自动化航空叶片磨抛加工过程中的逐点精准材料去除控制策略。该研究成果于2022年发表在制造领域权威期刊Journal of Manufacturing Processes。航空发动机是飞机制造的关键部件,而航空发动机叶片是航空发动机的重要组成部分。在发动机运行过程...

浙江省机器人与智能装备技术重点实验室成果:应用于机器人磨抛的力控末端执行器(图)
机器人 力控 末端执行器 磨抛过程
2023/3/16
机器人磨抛作业属于连续接触式加工,在磨抛过程中不仅要对机器人进行精确的位置控制,还要进行接触力控制,以提高加工精度。目前工业机器人进行力控制的方法主要有两种,即通过控制机器人关节力矩的直接力控法和利用机器人外部附加装置的间接力控法。前者需要建立准确的机器人动力学模型,并且机器人的大惯性会影响力控的动态响应速度和精度。后者可通过增加一个具有力控制功能的末端执行装置,与机器人通过宏微协调实现精准的力控...

MASTER-P1型自动磨抛机(图)
磨抛机 金属材料 重点实验室
2023/5/18
MASTER-P1型自动磨抛机为单盘台式机,是依据国际标准,采用国际先进工艺技术制造的新一代高精度、制样过程自动化的研磨抛光设备。
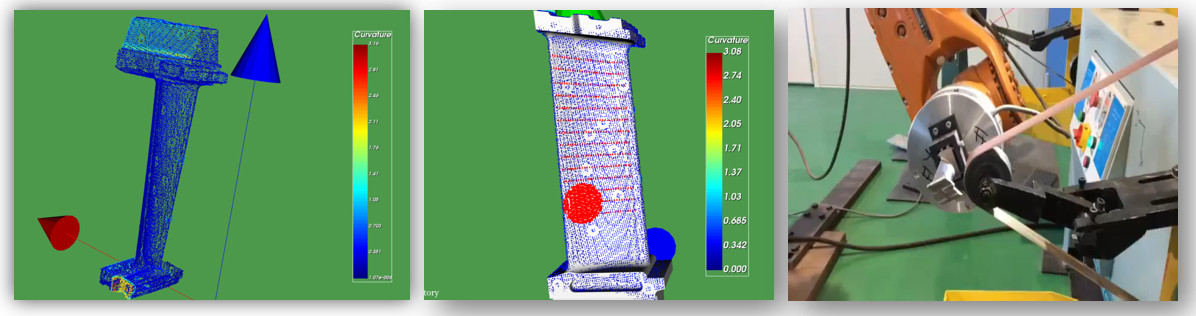
近日,中国科学院沈阳自动化研究所突破了高温合金航空发动机叶片机器人自动化磨抛的核心技术,包括叶片磨抛的边界一致型加工路径生成技术、叶片型面自动化测量技术、加工质量评价及加工余量分析技术、在线自适应工艺参数控制技术等。基于研究的相关技术,可以实现航空发动机叶片在一次装夹条件下的机器人自动化磨抛加工,对于提升航空发动机叶片的加工质量和效率具有非常重要的意义。
自行车摩托车钢圈液压(气动)自动磨抛机
钢圈 磨抛机
2008/8/20
该课题组针对目前自行车摩托大量的钢圈都采用原始落后繁重的手工操作现状,而设计了钢圈内、外、铡工位三品种规格液压(气动)控制自动靡抛机。该项目已完成三种品种磨抛机的全部设计工作,具备投产的整套图纸。
五轴磨抛机器人补偿算法研究与实现
五轴机器人 基于模型的机器人补偿 非模型的机器人补偿
2008/7/14
通过分析基于模型的补偿方法和非模型补偿方法的优缺点,结合一个五轴磨抛机器人的结构特点,提出了两种补偿方法相结合的混合补偿算法.针对平移关节误差的主要来源难于建模的特点,采用非模型的方法进行补偿;针对转动关节误差主要来源为几何参数误差,能够建模,但有些参数随机器人末端位置不同而变化的特点,采用二者相结合的混合方法进行补偿.通过对该机器人系统的实验,验证了方法的有效性和可行性.