
搜索结果: 1-4 共查到“计算机科学技术 软体”相关记录4条 . 查询时间(0.124 秒)

为抢抓人工智能发展的重大战略机遇,我国在《新一代人工智能发展规划》中明确指出要大力开展具有成像功能的类脑视觉传感技术研究。神经形态类脑视觉硬件作为具有光信息感知、信息处理、信息存储、逻辑思维和判断功能的新型器件,是构建类脑视觉感知和实现超低功耗类脑存算的核心部件,在人工智能、机器视觉、智能家居、自动驾驶、工业检测、生物医学成像及智慧健康等领域呈现出巨大发展潜力。传统神经形态视觉系统通过将传感单元、...
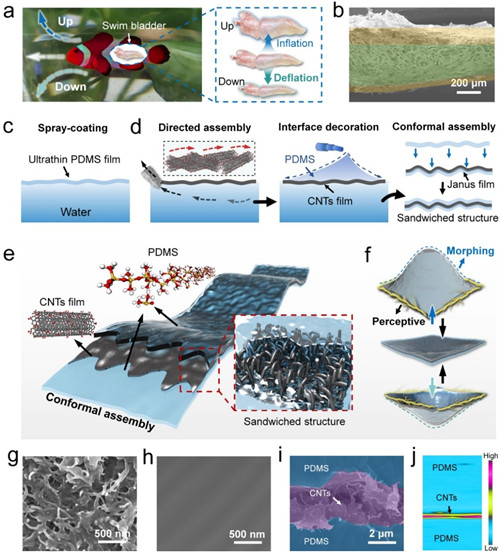
基于中国科学院宁波材料技术与工程研究所陈涛研究员课题组在柔性传感器和软驱动器方面的研究基础(Adv. Mater., 2020, 2004290; Nat. Commun., 2020, 11, 4359; Angew. Chem. Int.Ed., 2019, 58,16243; J. Mater. Chem. A, 2019, 7, 26631; ACS Nano, 2019, 13, 436...
一种基于蜂巢气动网络的软体夹持器抓取策略研究
蜂巢气动网络 软体机器人 夹持器 抓取
2017/12/1
提出一种新的基于蜂巢气动网络的软体夹持器,并进行抓取策略的研究.基于软体机器人具有无限自由度的特性,可以实现夹持器和物体表面极好的贴合.结合蜂巢气动网络的运动特性和抓取特性,针对每个备选抓取点进行抓取过程模拟,以确定其最终抓取形态.对于每个备选抓取点的最终抓取形态,提取出判定点进行相对形封闭性判定以确定可行解集合.对于每个可行解方案,通过计算适用于蜂巢气动网络的软体夹持器的评价函数以获取最优值,得...