
�������: 1-15 ���鵽�����������ơ��������� ������������ؼ�¼19�� . ��ѯʱ��(0.061 ��)
��Ի����Ǽ�����ĺ�����������������, ���Ŀ��Dz����д���Ұֵ�����, �����һ�ֹ������������ �ƵIJ������������˲��㷨. ϵͳ�����������˲������, ͨ�����˲�����״̬����ʶ��۲�Ұֵ, ���������� ����������������λ���. ����ѡ�����Ǽ���Թ۲������DZ�ӵĻ�������, �о����㷨����ֵ����ѡ��, �Բ�ͬ ���������µ��˲���������˶Ա�. ��ֵ����˵���˸��㷨�ڹ۲����仯�ʽϴ�ʱ�ܹ���Ч����...
��ϸ������ȫ���Ĵ�GNSSϵͳ���Ǽ���·��ISL����չ������״,��ϵͳ�ܽ��˹�������������������صĹؼ����о����⣬�ó����ҹ��Ǽ���·��������ϣ�ָ���ҹ��Ǽ���·��������ؽ�������о��ص�ͷ�չ����Ϊ�ҹ���������ϵͳ�ķ�չ�����ṩ�ο���
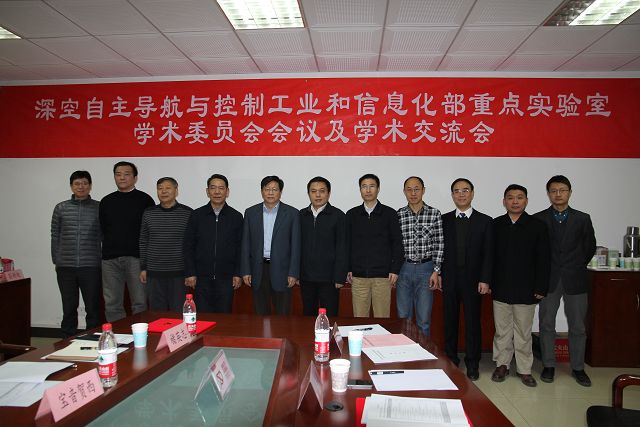
���������������ƹ�ҵ����Ϣ�����ص�ʵ�����ٿ���ѧ��ίԱ�������2015��ȹ������飨ͼ��
���������������ƹ�ҵ����Ϣ�����ص�ʵ���� ��ѧ��ίԱ�� ���� ��������
2016/1/13
2016��1��11�գ����������������ƹ��Ų��ص�ʵ�����״�ѧ��ίԱ������ڱ���������ѧ�ٿ������������������ƹ��Ų��ص�ʵ����ѧ��ίԱ��ίԱ������У���������˸�У�����½ܸ�У��������������ѧ����Ժ����������������������ѧ�ѧԺ�ټ�����Ժ�������������������ƹ��Ų��ص�ʵ���ҵĹǸɽ�ʦ��ѧ�������μ��˻��顣������������ѧ��ίԱ�����ΰ�Ϊ��Ժʿ�ֽ������˻��顣
���δ�����̽������½�߾���ʵʱ���������������һ��ͼ������������������������ͨ���½���ͼ��������������ƥ�䣬�����½�����������λ�ú���̬��Ȼ��������Kalmanģ������½����״̬���������������Ľ������ͼ����Ϣ�����õ�����£�ֻ���й��Ե������������ַ���������������ľ��ȣ�Ҳ�ܱ�֤ʵʱ�Ե�Ҫ�� ��ֵ������֤�˸÷����Ŀ����ԣ��÷�����δ��ʵ�ʹ���������кܴ�IJο���ֵ��
һ������ʣ�ű궨���ǹ�/�Ųⱸ��������������
�������� �Ų� �ǹ�
2015/6/17
��Կռ����ƽ̨GNSS����ϵͳ���ܸ��ŵ�ȱ��,���һ�ֻ���ʣ�ű궨�ĴŲ�/�ǹⱸ�ݵ�����������������GNSS�ź����ʱ������GNSS�߾��Ȳ�����Ϣ�ʹ�ǿ��/������ʣ�Ÿ��ŵ����ϲ�����Ϣ������ʵʱ���Ƴ�����ƽ̨����������ͬʱȷ�궨�����л�����ʣ��ų�ǿ�ȣ���GNSS�ź��ܸ����ж�ʱ����ʣ��ȷ�궨�Ļ��������ôų�/�ǹⱸ����������������ɻ���ƽ̨����������ʵʱ���ơ��ɷ�������֪����GNSS�ź�...
��Ե�����������½�йߵ������ʱ���������ṩȷ�ĸ߶Ⱥ���ά�ٶ���Ϣ�����⣬�����һ�ֹߵ������Ͳ������ϵİ�ȫ����½�����������÷����Թߵ�Ϊ���������ò���������ߵ��ĸ߶���Ϣ�����ò��������������ߵ����ٶ���Ϣ����ϸ�����˹��������Ļ���ԭ������ࡢ������������IJ��ԣ�������½���̵Ķ���ѧģ�͡�����������ģ�͡��˲����̡����ζ�������Ӱ��,�Լ����ʹ�õIJ��Ժ��㷨�������������������ѧ��������...
��������/GPS��HEO����������������
���ĵ��� ȫ��λϵͳ ��Ϣ�ں�
2015/5/19
Ϊ��ʵ�ִ���Բ���(HEO) ���Ǹ߾�����������, ���һ�ֽ�ֱ�����е�ƽ����������ȫ��λϵͳ(GPS) ���ϵ������������. ����, �������ǹ��??2 �˶�ģ�ͼ������ܿռ��㶯, �������ǹ������ѧģ��; Ȼ��,������һʹ������������GPS ����ȱ��, ����HEO���Ƕ�GPS �Ŀɼ���, �����Զ�ص�ֻ������������, ���ڽ��ص��������������Ϊ������ʱ����GPS �źŽ���λ�ٲ�������������...
��Դ�ͳ����/���Ķ�����������IJ����������ѡȡ��ȷ���ԣ������һ�ֻ��ڽ�������/���ĵ��������ϵij���ʱ��������ϵͳ��ͨ���Թ��������Ͷ�άת̨���ǹ۲��������Խ��н�ģ���ۺ����ߵ��ŵ㣬ʵ���˵��ǹ۲�ǶȺߵ��������ݵĸ߾����ںϣ��ڸ߶�ͨ������������ѹ�߶ȼƶԸ߶����������ᣬͨ���������˲����Թߵ����������Ź��ƣ����ÿɹ۲������۶�ϵͳ���з������õ�������������ѡȡ����Ч�ؽ�����ڲ���...
���̽������������������
�������� ���̽�� ����
2013/10/11
���̽���������������ڼ��ٵ����ظ���, ���̽������������������չ̽����������Ӧ��DZ���ȷ�����ж��ص�����, ���������ڹ�������̽�����Ѿ��ɹ���֤����ʼ��ʵ��������Ӧ��, δ��������������������Ϊ���̽�⼼����չ��һ�ֱ�Ȼ����. �����ҹ������Դ����, ���ҹ������̽��滮��, ��չ���������������Եø�Ϊ��Ҫ. ���ҹ�������չ���Ǻ�С����̽��ƻ��ı�����, ���������˹������̽��������...
���ڹ����ϳɹ���½�Ļ���̽�������δ��������½̽�⼼���ķ�չ�������˻��ǽ�������������ı�Ҫ�ԡ������ܽ��˻��ǽ�������������������о���״�뷢չ���ƣ��������˻��ǽ���������������ص��Լ������ٵ���ս���������˻��ǽ���������������漰�Ĺؼ������������ҹ�δ������̽���������ε���������������չ���������չ����
Ԥ��-У��EKF�㷨�����������е�Ӧ��
�������� �����Թ��� ƽ�� ��ֵ����
2009/11/26
Ϊ��ߺ�������������ϵͳ�����Թ��ƾ��ȣ�ͨ������EKF���Ի�������ȱ �㣬������ѧ���������о��˷����Ժ������Ի�չ�����Լ��ſɱȾ���ȡֵ�㲻ͬ�����Ի� �ƽ��̶ȵ�Ӱ�죬Ȼ��Դ�ͳEKF�㷨�����Ի�չ����ʽ�����˸Ľ��������һ�ֻ�����ֵ ������ƽ�����Ƶ�Ԥ��-У��EKF��FR\|EKF�����㷨�����������������㷨�ھ��������� EKF�㷨��
������������˲�������������������
���� ���ĵ��� ��λ���� ̫��������
2009/10/27
������������ϵͳ�����������̽������Ļ����ؼ�����������������������Ҫ�������һ�ֻ������������뺽λ�������ϵ����������������������ȸ��������˶�ģ�ͽ�����ϵͳ��״̬���̣�Ȼ������̫��������������̫���߶Ⱥͷ�λ��Ϊ�۲���Ϣ����������������ϵͳ���Ժ�λ����ϵͳ����ĺ�������ʺ������н�����Ϊ�۲���Ϣ������DR������ϵͳ������������������˲�ʵ��������Ϣ�����Ź��ƺ���Ϣ�ۺ�����������ϵ...
������������ϵͳ�����������̽������Ļ����ؼ�����������������������Ҫ�������һ�ֻ����ٶȺ��������Ϲ۲�����������������������ȸ��������������������Ҫ�����ݹ��������Ļ���ԭ�������������¹�������ϵͳ����̬���ٶȺ�λ�����̣�Ȼ����������صĽ����ߵ�ϵͳ���ص㽨���˻����ٶȺ��������Ϲ۲�����ⷽ�̣����ڽ�����ϵͳ״̬���̺����ⷽ�̾�Ϊ���Է��̣����Բ�����Kalman�˲�ʵ������...
�����һ�����̽������½�ε����������������÷���ͨ��������������ͼ��������������ƽ���ϵ�λ�ã���ϼ������Ǹ�����̽������С�������ľ�����Ϣ����������ʵ��λ�ò�ȷ��������£�������չ�������˲���̽���������λ����̬���˶���Ϣ���еݹ���ơ�ͬʱ�ع����������άλ�á����ڲ���Ҫ��ѡ��������С�������ľ�ȷλ�ã������������������������ԡ����ͨ����ѧ������֤������������������Ч�ԡ�
��Ե���ת�ƹ��������̽���������һ�ֻ������������������������㷨��̽�������ն������ɳ�ʼ��̬���������������д��ӳ����ԣ��ƺ�����תһ�ܿ���ʵ�ֶ�ȫ����70%���ҿռ�ĸ��ǣ�����кܴ�Ļ����ڵ���ת�ƹ��ʵ�ֶԵ��������Ĺ۲Ⲣ��õ��ķ�������ķ���IJ���ֵ���������ȶ������������Ļ����ӳ����з��������ý��������Ƶ�������������/�ؿɼ�����������о��ɵ��ķ�������ķ��β�����ȷ����������ij�ʼ...
�й��о����������а�-��
- ���ڼ���...
�й�ѧ���ڿ����а�-��
- ���ڼ���...
�����ѧ���л������а�-��
- ���ڼ���...
�й���ѧ���а�-��
- ���ڼ���...
�ˡ���-ƪ
- ���ڼ���...
�Ρ���-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
�������� -ƪ
- ���ڼ���...
֪ʶҪ��-ƪ
- ���ڼ���...
���ʶ�̬-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
ѧ��ָ��-ƪ
- ���ڼ���...
ѧ��վ��-ƪ
- ���ڼ���...