
搜索结果: 76-90 共查到“交通信息工程及控制”相关记录816条 . 查询时间(0.557 秒)
广东工业大学土木与交通工程学院硕士生导师赵佳虹副教授
赵佳虹 广东工业大学土木与交通工程学院 硕士生导师 副教授 交通信息
2021/12/14
赵佳虹,广东工业大学土木与交通工程学院,硕士生导师,副教授。主要从事交通运输组织、交通安全管理、物流系统管理、交通控制等领域的教学科研工作。主持参与国家自然科学基金、广东省自然科学基金等项目10余项,发表学术论文20余篇(SCI、EI收录10余篇),受邀担任Transportation Research Part E、European Journal of Operational Research...

2021年12月6日,第十六届中国智能交通年会(ITSAC 2021)暨2021中国智能交通大会(以下简称“活动”)在湖南长沙开幕。本次活动由中国智能交通协会主办,北京百度网讯科技有限公司、北京千方科技股份有限公司、中国民用航空总局第二研究所、深圳市腾讯计算机系统有限公司协办。本次活动以“ITS开创可持续交通新格局”为主题,聚焦“双碳”目标下的行业发展方向,来自科技、交通运输、公安等行业主管单位、...

山东交通学院张萌萌受聘北京交通大学兼职教授(图)
山东交通学院 张萌萌 北京交通大学 兼职教授
2022/5/17
2021年11月30日下午,山东交通学院张萌萌受聘北京交通大学兼职教授聘任仪式在交通运输学院8415会议室举行。山东交通学院交通与物流工程学院院长张萌萌、副院长张萌、安全工程系副主任王建豪,交通运输学院党委书记姚恩建、交通工程系支部书记王江锋、系主任岳昊出席聘任仪式。仪式由王江锋主持。
中国图象图形学学会交通视频专业委员会
中国图象图形学学会 交通视频专业委员会 交通视频
2022/9/18
中国图象图形学学会交通视频专业委员会是中国图象图形学学会下设的专委会之一,由中国图象图形学学会铁道专业委员会更名而来。专委会由国内从事交通相关基础理论与应用研究、软硬件技术开发以及应用推广的专家学者和相关科技工作者组成,委员来源涵盖国内著名高等学校、科研院所以及相关企业。专委会旨在团结和组织我国交通相关领域的专业人士,开展学术交流活动,加强人才培养,促进学术界与工业界的合作,承担知识普及、建言献策...

近日,2021年度中国智能交通协会科学技术奖获奖项目公布。自动化系系统工程研究所李力副教授入选2021年度中国智能交通协会优秀创新人才奖,同时以第一完成人申报的项目“端云融合的涉车交通大数据分析与安全防控关键技术及引用”获得2021年度中国智能交通协会科技进步奖二等奖。

哈尔滨工业大学交通科学与工程学院科研成果整合大数据挖掘与路网脆弱性评估的疏散交通管理研究。

哈尔滨工业大学交通科学与工程学院科研成果路网养护与决策技术。

武汉科技大学汽车与交通工程学院硕士生导师柳祖鹏副教授(图)
柳祖鹏 武汉科技大学汽车与交通工程学院 硕士生导师 副教授 微观交通仿真 智能汽车
2021/10/13
柳祖鹏,副教授,硕士生导师。现兼任国家自然科学基金通讯评审专家。近年来主持国家自然科学基金青年项目1项、湖北省教育厅科学研究计划指导项目1项;发表学术论文20余篇,参编教材1部,参与在线课程建设2门。主要研究方向:公交优先、微观交通仿真、智能汽车的管理与控制。
考虑车辆跟驰作用和通信时延的网联车辆队列轨迹跟踪控制
智能网联车辆 轨迹跟踪 跟驰作用 通信时延
2024/1/19
针对智能网联车辆轨迹跟踪问题,本文通过考虑车辆跟驰作用和车车通信过程中存在的通信时延,提出了一种分布式非线性轨迹跟踪控制器.具体来讲,首先,提出一种双向领导跟随通信拓扑来描述智能网联环境下车辆间的通信连接.其次,考虑车辆跟驰作用和通信时延,设计一种分布式非线性轨迹跟踪控制器.然后,使用Lyapunov方法证明了所设计控制器的稳定性.最后,考虑速度干扰作用于领导者车辆,针对无时延、同质时延和异质时延...
现实中城市交通流的运行具有很强的非线性特性,采用简单的线性模型难以全面描述交通流的实际运行过程.本文在考虑城市交通流非线性动态特性的基础上,提出了一种非线性交通流排队模型,并基于宏观交通流固有的周期性特征,设计了交叉口信号的迭代学习控制策略.通过对交叉口信号的迭代学习控制,使交叉口各进口道的车辆排队长度尽可能趋于均衡,提高交叉口信号有效绿灯时间的利用率,从而提高路网的通行效率.最后通过严格的数学推...

潘义勇,博士,副教授,硕士生导师。江苏省交通运输职业教育行指委专委会副主任委员、世界交通运输大会(WTC)技术委员会主席(2016)、国家自然科学基金函评专家、美国南佛罗里达大学访问学者。主持国家自然科学基金1项,参与国家自然科学基金1项、江苏省自然科学基金3项,以一作和通讯发表论文 30 余篇,专利授权6项,担任Journal of Advanced Transportation、浙江大学学报和...
结合智能车面临的横向安全问题,设计了一种具有横向安全性的智能驾驶员模型.该系统由转向控制、速度控制和决策规划三个模块组成.该系统的主要作用包括:一是通过在转向控制中加入主要约束提高车辆在转向过程中的横向稳定性,减小车辆发生侧滑、侧倾、侧偏等风险;二是在换道场景下,决策规划单元合理分析交通环境中的车间距并计算出驶入临近车道的速度和轨迹,使智能车实现安全换道.CarSim/Simulink仿真结果表明...

依托国家重点研发计划“城市多模式交通网运行仿真系统平台开发”项目,由东南大学交通学院王炜教授与任刚教授主编的《城市交通时空大数据格式标准》(T/CITSA 10-2021)与《应急疏散道路交通组织设计指南》(T/CITSA 14-2021)两项团体标准,根据《中国智能交通协会团体标准管理办法》有关规定,经标准化技术委员会审查、批准,其自2021年7月26日起发布实施。
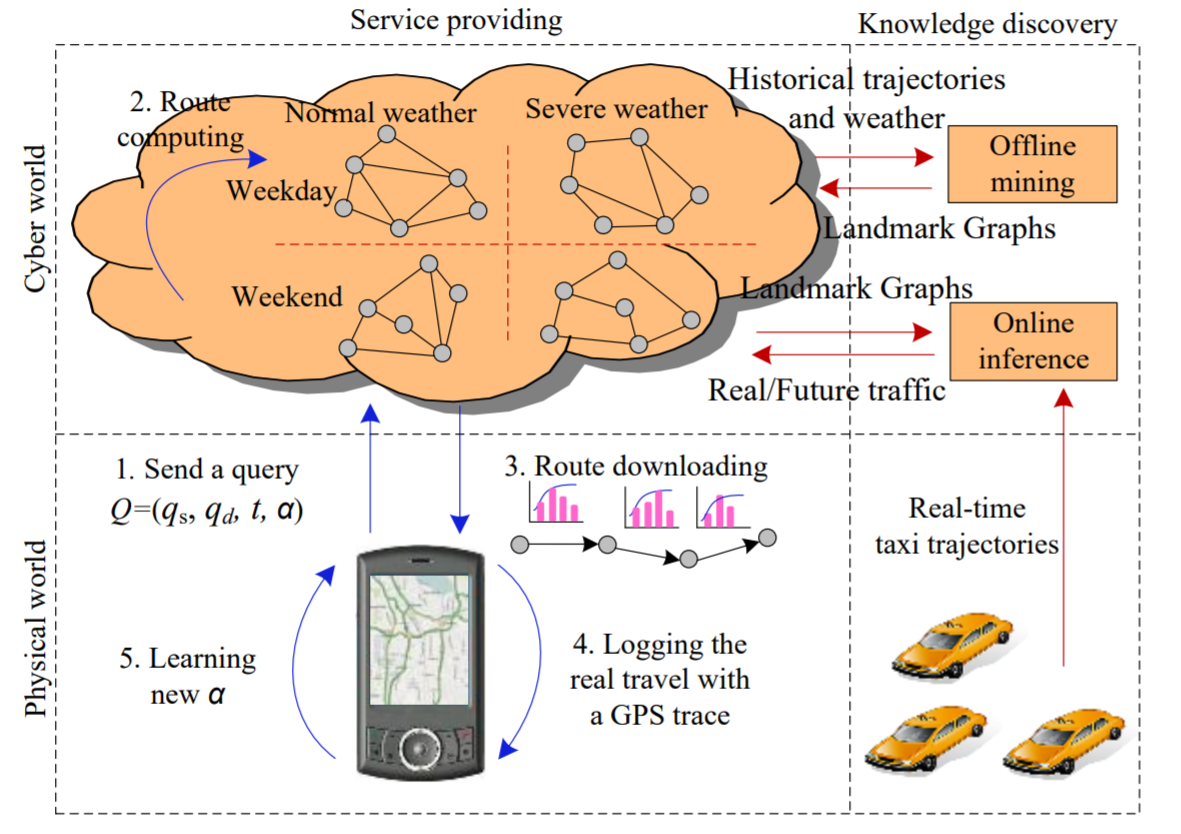
2021年7月,ACM SIGKDD中国分会年会在成都召开,会上颁发了2021年度“Test of TimeAward”,用于奖励由中国科学技术大学、微软亚洲研究院的研究者合作发表在2011年ACM SIGKDD Conference on Knowledge Discovery and Data Mining(KDD 2011)的研究论文“Driving with Knowledge from ...
高速列车非线性系统的分数阶有限时间控制器设计
分数阶有限时间控制器 高速列车 不确定性 执行器故障 非线性
2024/1/22
针对具有输入非线性,不确定的气动阻力,未知的车间力,外部扰动以及未知的执行器故障等特征的高速列车非线性系统,结合分数阶稳定性原理以及有限时间控制理论,本文设计了一种分数阶有限时间控制器以实现高速列车更快速且更高精度的跟踪控制.该控制器能够直接补偿高速列车的不确定性和非线性以及执行器故障而不需任何“试错”过程,且稳定时间可由控制参数的不同选择来调整.仿真研究验证了所设计控制器的有效性和优越性。