搜索结果: 1-15 共查到“机械工程 机器人”相关记录32条 . 查询时间(0.162 秒)

曹其新,从事方向:机器视觉与模式识别、智能机器人与模块化技术、智能维护与物联网技术。

2023年11月28日,机械工程学院在12C106开展OpenHarmony智能机器人Spark-H培训会。本次培训的目标是基于华为开源操作系统OpenHarmonyOS的智能机器人,一个全场景、分布式的操作系统,旨在实现各种设备的高效连接和协同工作,结合实际机器人开发案例,帮助同学们全面掌握机器人技术的核心概念和应用。培训会由机械工程学院副院长曾达幸和武静博士主持,机械工程学院教师代表及相关研究...

天水锻压集团代表甘肃省参加全国焊接机器人决赛并获优秀组织奖(图)
天水锻压 焊接 机器人 优秀组织奖
2023/7/4
2023年6月7-9日,天水锻压机床(集团)有限公司派出由5名焊工和技术指导裁判组成的团队,代表甘肃省参加了在福州举办的“全国职工数字化应用技术技能大赛”的焊接机器人比赛决赛,并获得优秀组织奖。

四川农业大学机电学院获得机器人竞赛省级一等奖(图)
四川农大 机器人竞赛 四川省
2023/8/18
2022年12月4日,由四川省教育厅主办、西南石油大学承办的第七届四川省大学生机器人大赛圆满落幕。来自四川大学、西南交通大学、四川农业大学、成都理工大学等41所高校的2200余名学子组成的450支参赛队伍进入决赛。四川农业大学机电学院许丽佳、王玉超教师共同指导的4支队伍分别参加“ROS智能小车无人驾驶”和“机器车循迹”赛道决赛,其中王嘉祥的ROS智能小车无人驾驶团队以96分(满分100分)斩获四川...

2022年11月21日下午,海南大学机电工程学院与苏州龙旗机器人有限公司在研发楼417会议室进行交流座谈,海南大学机电工程学院院长唐荣年、机电工程学院党委副书记张喜瑞(主持党委工作)及部分学院相关领域研究团队代表出席了座谈会。唐荣年院长介绍了机电工程学院的历史沿革、师资力量和科研成果等情况,表示海南大学具有强烈的服务国家需求和产业发展的使命感和责任感,双方围绕智能机器人领域发展需求,建立产学研一体...

科技是国家强盛之基,创新是民族进步之魂。2022年10月30日,第十三届江苏省大学生机器人大赛机器人自主创新创意设计竞赛落幕。经过激烈的角逐晋级省赛,最终经大赛评委会评审,组委会审议决定,江苏科技大学机械工程学院《变结构仿生队》荣获省级二等奖,《蜘蛛仿生队》荣获省级三等奖。
重庆移通学院智能工程学院机器人工程专业介绍
重庆移通学院智能工程学院 机器人工程 专业介绍
2022/11/26
重庆移通学院智能工程学院机器人工程是一门在真实世界环境下将感知、决策和执行驱动融合在一起的应用交叉学科和技术。机器人工程属国家新兴产业,也是教育部本科专业目录新增加专业。该专业2018年开始招生,重庆移通学院是重庆市最早开设机器人工程专业的本科院校之一。机器人工程专业现有专任教师8人,其中副教授1人,讲师3人,助教4人;硕士研究生占比100%;该专业教师为自动化、测控技术与仪器等相关专业,其中7人...

宁波肯倍机器人科技有限公司(图)
宁波肯倍机器人科技有限公司 智能制造 机器人
2022/6/8
肯倍-ABD:致力于纯国产机器人本体的研发、生产制造、销售。以客户需求为导向、基于优秀管理、技术引领、诚信经营、服务未来的核心宗旨,结合产业用智能制造及机器人11年的深度研发,7年的生产一线实际应用,凝聚简单、 有效、友好理念的前端技术及卓越性能,肯倍机器人可以充分满足顾客对 生产效率及产品品质的提升要求。拥有专门的研究团队(目前联合研发团队博士6人,本科以上包含硕士22人)并拥有智能智造生态圈的...
浙江大学机器人研究院
浙江大学机器人研究院 机器人
2022/6/8
浙江大学机器人研究院(以下简称“研究院)是为了贯彻落实浙江省委省政府关于推进工业转型升级的战略部署,在余姚市的大力推动下,于2017年由浙江大学和余姚市合作共建的新型研发机构。研究院面向科技前沿、面向经济发展主战场,将机器人、智能装备研发及产业化作为主要突破方向;立足余姚、服务浙江、面向全国。以“合作、创新、智能、引领”为理念,以体制机制创新为抓手,以科技研发、成果转化和人才培育为核心,着力构建技...

余姚市市委副书记王娇俐调研浙江大学机器人研究院(图)
余姚市 王娇俐 浙江大学机器人研究院 调研
2022/6/8
2022年5月20日下午,余姚市市委副书记王娇俐一行莅临浙江大学机器人研究院调研,市委办公室副主任万建龙参加。余姚经济开发区党工委书记、管委会主任戚红军,浙江大学机器人研究院常务副院长陆国栋,副院长赵川平,院长助理王进陪同。会前,王娇俐副书记一行参观了研究院展示馆及实验基地,对研究院建院5年多以来取得的成果给予肯定。

在抗疫特殊时期,上海工程技术大学机械与汽车工程学院陆续推出了云端学术盛宴,云端话学术,同心战“疫”情。为进一步加强校内外学者学术交流,促进学科方向交叉与科研合作,5月14日-15日,上海市大型构件智能制造机器人技术协同创新中心云端学术论坛的两场学科交叉方向分论坛如期举行。来自哈尔滨工业大学、合肥工业大学、南昌大学、上海大学等高校与企业以及我校的16位青年学者做专题报告,校内外教师、企业工程师、研究...
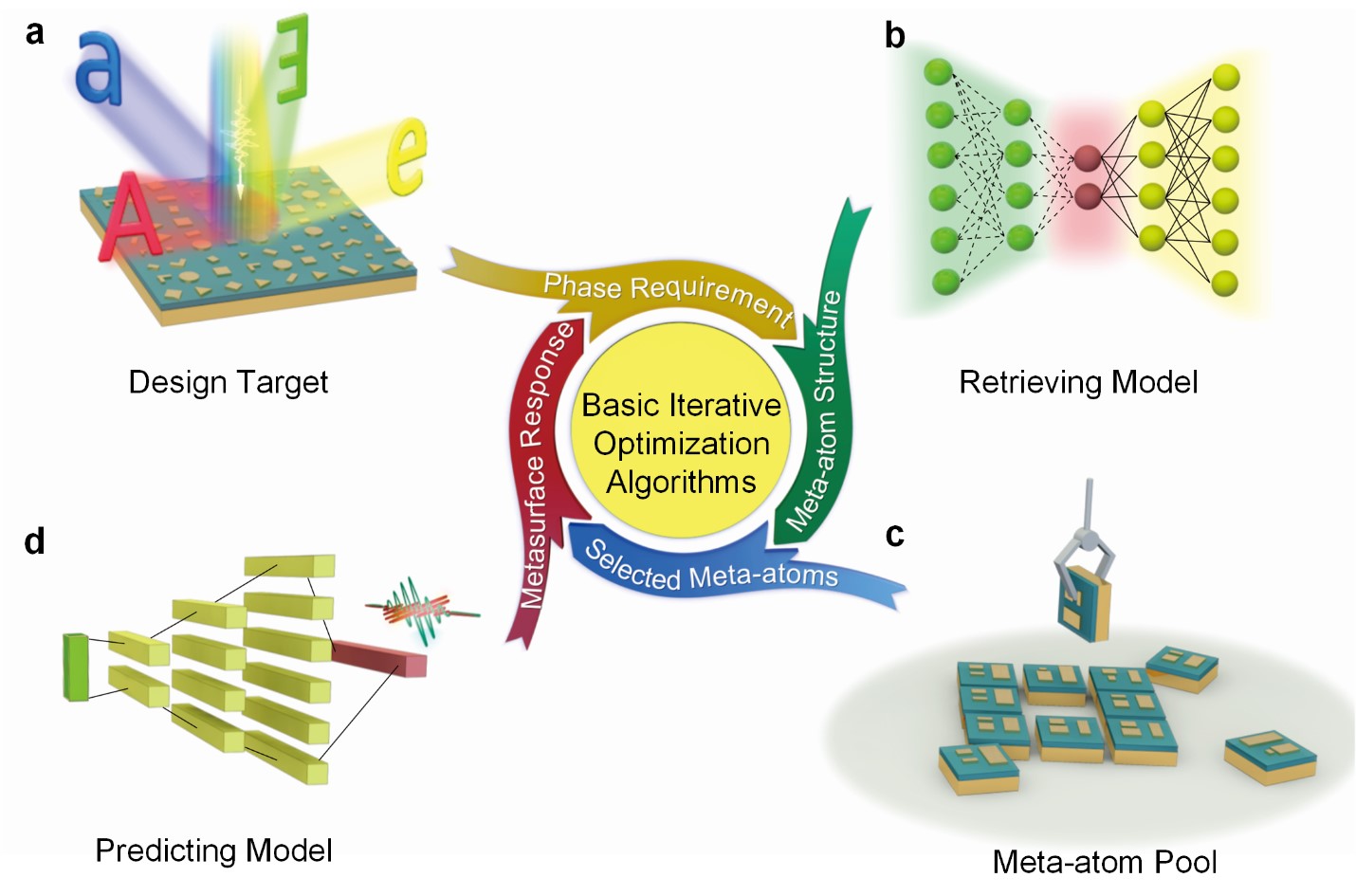
近日,南京大学物理学院彭茹雯教授和王牧教授研究团队与浙江大学马蔚研究员、美国东北大学刘咏民教授课题组合作研究,提出了一种基于统计机器学习方法的微纳光子器件自动化高效设计框架。相比于基于数值仿真的传统试错搜索方法,该设计框架通过机器学习模型挖掘训练数据中设计结构与光学响应间的统计规律,并结合其他迭代优化算法,最终实现了超表面微纳光学器件的大规模、系统级寻优和设计。基于此框架,研究团队设计并实验验证了...

余姚市市委副书记、市长沃勇特调研浙江大学机器人研究院(图)
浙江大学机器人研究院 余姚市 沃勇特 调研
2022/6/8
2022年4月27日上午,余姚市市委副书记、市长沃勇特一行莅临浙江大学机器人研究院调研指导,市委常委、副市长毛丕显,市政府办公室主任胡建立,市政府办公室副主任马江领参加。余姚经济开发区党工委书记、管委会主任戚红军,我院常务副院长陆国栋,副院长赵川平,院长助理王进、李基拓陪同。

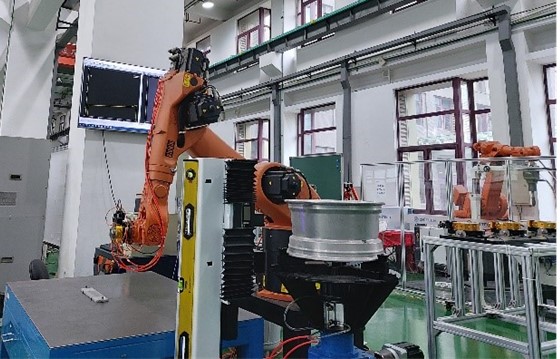
浙江省机器人与智能装备技术重点实验室成果:应用于机器人磨抛的力控末端执行器(图)
机器人 力控 末端执行器 磨抛过程
2023/3/16
机器人磨抛作业属于连续接触式加工,在磨抛过程中不仅要对机器人进行精确的位置控制,还要进行接触力控制,以提高加工精度。目前工业机器人进行力控制的方法主要有两种,即通过控制机器人关节力矩的直接力控法和利用机器人外部附加装置的间接力控法。前者需要建立准确的机器人动力学模型,并且机器人的大惯性会影响力控的动态响应速度和精度。后者可通过增加一个具有力控制功能的末端执行装置,与机器人通过宏微协调实现精准的力控...