
�������: 1-15 ���鵽��������ѧ�뼼�� ����������ؼ�¼57�� . ��ѯʱ��(0.191 ��)
�й���ѧԺ�Ϸ����ʿ�ѧ�о�Ժר����һ�ֶഫ������������צ
�й���ѧԺ�Ϸ����ʿ�ѧ�о�Ժר������������צ����ָ�����ԽӴ�����������
�й���ѧԺ�Ϸ����ʿ�ѧ�о�Ժ ר�� ��������צ ����ָ�� ���ԽӴ�������
2023/12/12
�й���ѧԺ�Ϸ����ʿ�ѧ�о�Ժר������������צ����ָ�����ԽӴ�����������
2023��9��13�գ���ҵ����Ϣ�����칫��������������֯��չ2023��δ����ҵ��������Ұ��˧������֪ͨ�������¼�ƣ���֪ͨ�������������Χ��Ԫ���桢�������������Ի��ӿڡ�ͨ���˹�����4���ص㷽�۽����Ļ������ص��Ʒ������֧�š�ʾ��Ӧ�õȴ�������������һ�����չؼ����ļ������߱���ǿ�������������Ƶ�λ��ͻ��һ����־�Լ�����Ʒ�������¼������²�Ʒ���Ӧ�á�
���ڣ���ҵ�����Ӿ������̿�����(Cognex)��������ͬ����400����Ԫ(Լ��2.75����Ԫ)ȫ�ֽ���ʽ�������ʱ��ع�����˽ļ��Ȩ�ӹ�˾Trustar Capital�����չ�Moritex��Moritex��һ�����ձ�ӵ��ǿ��Ӱ�����������Ӿ���ѧ�����Ӧ�̡�

������ͨ��ѧУ�ѡ��������������Ƽ�����˾���³�˧÷���õ�һ����ҽԺǢ̸Ժ�������ͼ��
�������� ������ͨ��ѧ ��������
2023/8/9
���գ�������ͨ��ѧУ�ѡ��������������Ƽ�����˾���³�˧÷����һ��Ժ��˫����ҽ����ϡ��˹����ܵȷ���չ��������̸��������ͨ��ѧ��У������һ����ҽԺԺ�����㣬ҽѧ������������������ҽѧ�������κس��У�ҽѧ�������Ρ���һ����ҽԺ��Ժ�����ֲ֣��Լ�ҽѧ������еѧԺ��һ��Ժ������Ժ�������ж�ͯҽԺ�ȵ�λ�����Ա�μӻ��顣�������������Ƽ�����˾���³����������պ����ѧ���ڡ��й�����AI���ܿ���רί��...
�й���ѧԺ�������ϼ����빤���о�������������������������֪����Ƥ��ˮ�����������о��л��չ��ͼ��
������������ ������ ��֪����Ƥ�� ˮ����������
2022/9/14
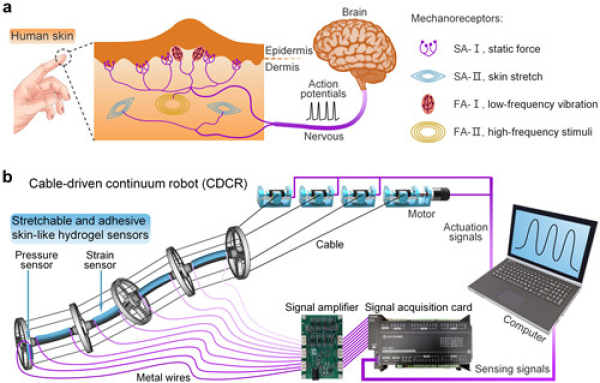
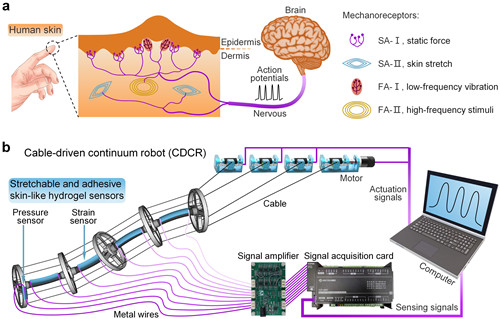
��������������������CDCR������Ҫ�����������������нṹ���ɡ���ȫ�����ɶȸߵ��ص㣬�ܹ����������������ԺͿ������Բ��������������Ťת���εȶ����������������խ���ӵĻ����кܺõع�����Ŀǰ��CDCRϵͳ�г��õĹ��˲������դ������ģ���ߡ��쳤�ʼ��͡�ȱ��ճ�����ƣ��������������������˶��������������ֲ㣬��ʹ���ָ��ԵĴ��������ʺϼ���ϵͳ�����������Կ�𤸽������������CDCR���Ը�֪�����˶���...
�п�Ժ�Ϻ���Ժ��������������������������������֪����Ƥ��ˮ����������ȡ�ý�չ(ͼ)
���������� �����˸�֪ Ƥ��ˮ���� ������
2022/12/19
��������������������CDCR����һ�ַdz���Ҫ�����������������нṹ���ɡ���ȫ�����ɶȸߵ��ص㣬�ܹ����������������ԺͿ������Բ��������������Ťת���εȶ������������������խ���ӵĻ����кܺõع�����Ȼ��ĿǰCDCRϵͳ�г��õĹ��˲������դ������ģ���ߣ��쳤�ʼ��ͣ�ȱ��ճ�����ƣ�������������������������˶����������������ֲ㣬��ʹ�����ָ��ԵĴ��������ʺϼ���ϵͳ�����������Կ�𤸽������������CD...

��������������������CDCR����һ�ַdz���Ҫ�����������������нṹ���ɡ���ȫ�����ɶȸߵ��ص㣬�ܹ����������������ԺͿ������Բ��������������Ťת���εȶ������������������խ���ӵĻ����кܺõع�����Ȼ��ĿǰCDCRϵͳ�г��õĹ��˲������դ������ģ���ߣ��쳤�ʼ��ͣ�ȱ��ճ�����ƣ�������������������������˶����������������ֲ㣬��ʹ�����ָ��ԵĴ��������ʺϼ���ϵͳ�����������Կ�𤸽������������CD...
������������������Ӳ���Ƚ��������Ŷ�������ʽ����ѹ��������˼·��ͼ��
�й���ѧԺ�Զ����о��� ������ ��� ����
2022/6/22
����ѹ�����������������˻�����������������������ҽ�Ƶ������Ǵ�������������Ҫ��Ա֮һ��Ȼ������������ѹ���������ڸ������ȡ����ȶ����Լ��ߴ��з�Χ�ȷ�����Ȼ���ڽϴ���ս����������������������Ĺ㷺Ӧ�á��Զ������Ƚ��������Ŷӳ����о�Ա�Ƚ��ṹ�������ԭ�����������һ������ѹ��������˼·--���������ڵ��Ĺ��ʽѹ�����������ô������봫ͳ����ʽ��������ȣ��������ܹ�����Լһ����������
�Ϸʹ�ҵ��ѧ����ѧԺ�������������Զ�ά������������ȡ����Ҫ��չ��ͼ��
�Ϸʹ�ҵ��ѧ����ѧԺ �����������Զ�ά�������� Advanced Materials Technologies
2023/1/6
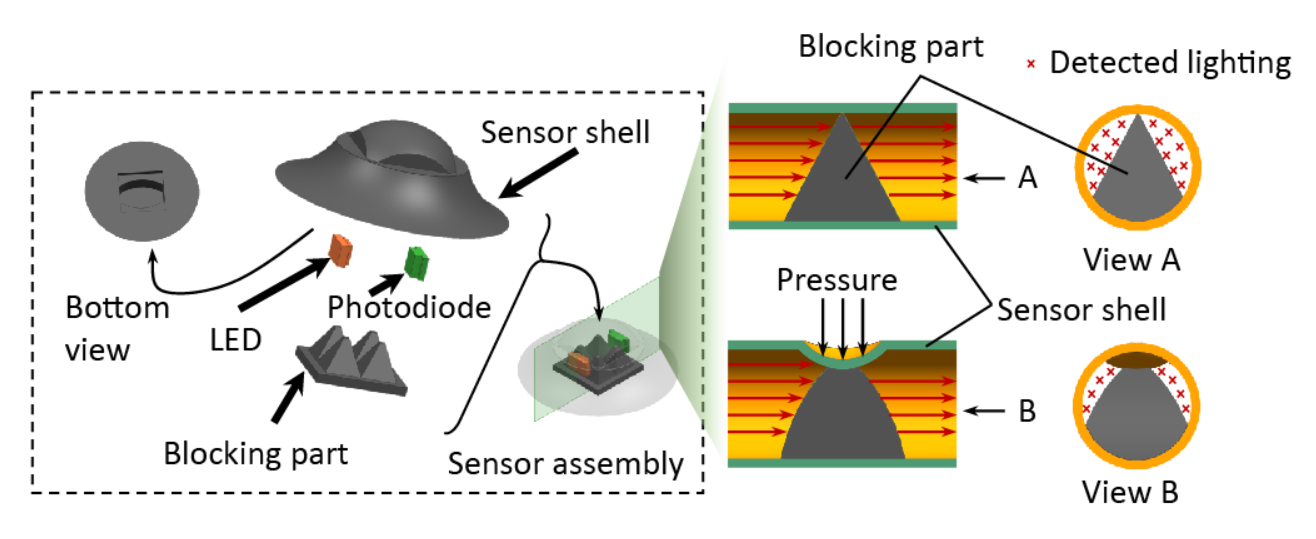
����Ƥ��������ָ�ƽṹ���ֻ�е���壬�������ظ��ܵ�ѹ����Ħ����������������ѧ���м��������������Ĵ������ܣ�ʹ��ץ�ո�֪�����ﵽ���������ִ���ˮƽ���������������о������һ����Ҫ���ݡ����գ���Ժ��ƽ�����������һ�����ڼ�ⷨ��������������г��ʽ���Դ�����������װ���˸ô��������������ܹ���ץȡ�����жԲ��ʽ���ʶ��ȷ�ʴ�92.5%����سɹ��ԡ�Flexible and wireless norm...
���գ����ҷ�չ�ĸ�ί�´�����Ԥ����Ͷ��33.8��Ԫ�������߾������¹ڷ���������ؾ������������鷢�����ر���ȥ���°����������ҹ��߾��ڰ��������ѹ�����������ⲡ��������ճ�������������2021��11�£��߾����������벡��1895��������Ҫ�߾�����רҵ������Ա�䱸���㣬139���߾����У��䱸������Ա����20�˵��ؾ���26��������ҽ��������Ա���������Ҳ��һ��ͻ�ԣ�������������ʡ�л����������֧Ԯ...
2022��2��4�գ��������»���Լ�ٰ졣��Ļʽ������ʢ�磬�����ڶ������������˶�Ա��ȫ��������Ϊ����ࡢ��ȫ�����ʡ���ͨ����ֵ��һ����ǣ����춬�»ỹʵ���˶���״Σ�����һ��ɹ��������ڻ�洫���С�2��2�գ��ڱ������¹����еĶ��»�洫�ݻ�У��������Զ�����ǣͷ�����ϱ���������е�о������㶫��������ϵͳ�о�Ժ�ȵ�λ��������ˮ����������ʵ��ˮ�»�����������25���ʱ���↑չ�˽��ٴεIJ��ԣ���...

�Ϻ���ͨ��ѧ�������о����Ŷ��о���Ʋ�����֪һ�廯��������֫�֣�ͼ��
������֪һ�廯 ������֫�� ���ɼ�������봥�� ���������֫����
2022/4/21
2021��8��16�գ�����Ȼ������ҽѧ���̡���Nature Biomedical Engineering�����߷������Ϻ���ͨ��ѧ��е�붯������ѧԺ�������о������������ȹ�ӭ���ں���ʡ����ѧԺ��ѡ�ؽ��ڵĺ������ġ�������֪һ�廯��������֫�֡���A soft neuroprosthetic hand providing simultaneous myoelectric control and ta...
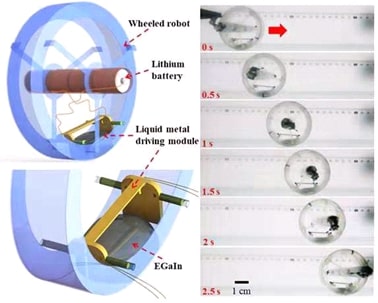
�й���ѧ������ѧ���ܻ�е�뾫������ϵ|Һ̬���������������о�ȡ����Ҫ��չ(ͼ)
�ػ�����Һ̬���� ���ͻ����� ����������ʽ
2021/8/5
�й���ѧ������ѧ���ܻ�е�뾫������ϵ�����丱�����о��Ŷӡ��Ĵ�����������ѧ�����������о��ŶӺ����ݴ�ѧ��������ϵͳ�����������������о��Ŷ���ɵ������о��飬����˻����ػ�����Һ̬�������������������������״�ʵ����Һ̬���������Ĺ�������ʽ�ƶ������������գ��óɹ��ԡ�A Wheeled Robot Driven by a Liquid�\Metal Droplet��Ϊ�⣬�����ڡ��Ƚ����ϡ���־�ϣ�A...

�Ϻ������е�붯������ѧԺ�������о��������������Ŷ��ڸ�����������������ѹ��Ƥ���о���ȡ���½�չ��ͼ��
���ߵ��ݻ��� ��������Ƥ�� ����ѹ��Ƥ�� ���ߵ���ѹ��������
2022/4/21
���գ��Ϻ������е�붯������ѧԺ�������о������������ڡ��ȹ�ӭ�����Ŷ������������ͻ�÷¡��ѧ��Carmel Majidi������Advanced Materials�ڿ��������һ�ָ�������������������ѹ��Ƥ�������ó��ߵ��ݻ�����ʵ���˳�����ѹ����ⷶΧ��������Ӧʱ�䡢�ߵ��ݻ��ߣ�nF-��F����������ȣ��������źż�⡢��㴫�����С��м��������֫�ִ�������������ȡ����ʵ��Ӧ�á����ġ�Cutaneo...
�й��о����������а�-��
- ���ڼ���...
�й�ѧ���ڿ����а�-��
- ���ڼ���...
�����ѧ���л������а�-��
- ���ڼ���...
�й���ѧ���а�-��
- ���ڼ���...
�ˡ���-ƪ
- ���ڼ���...
�Ρ���-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
�������� -ƪ
- ���ڼ���...
֪ʶҪ��-ƪ
- ���ڼ���...
���ʶ�̬-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
ѧ��ָ��-ƪ
- ���ڼ���...
ѧ��վ��-ƪ
- ���ڼ���...