
搜索结果: 1-15 共查到“抛”相关记录265条 . 查询时间(0.259 秒)
随机退化抛物方程的两类多目标问题
随机退化 抛物方程 两类多目标问题
2023/12/13
This paper is devoted to studying two multiobjective problems for stochastic degenerate parabolic equations. The first one is a hierarchical control problem, in which the controls are classified into ...
中国热带农业科学院农业机械研究所专利:一种可折叠式饲料收获机抛送筒。
新加坡环境公共卫生(修正)法案2023年2月在国会获得通过,这一法案的修订内容包括为组屋(由新加坡建屋发展局承担建筑的公共房屋)高楼抛物案件增设假定条款。

沈阳自动化所在复杂曲面机器人自动化磨抛加工领域取得新进展(图)
机器人自动化 磨抛加工 航空发动机
2023/8/22
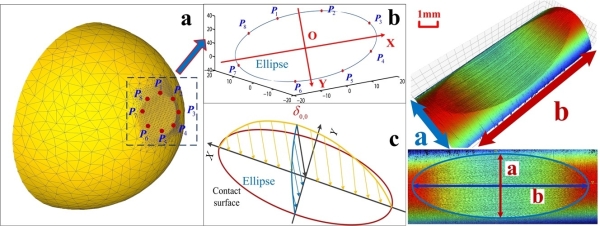
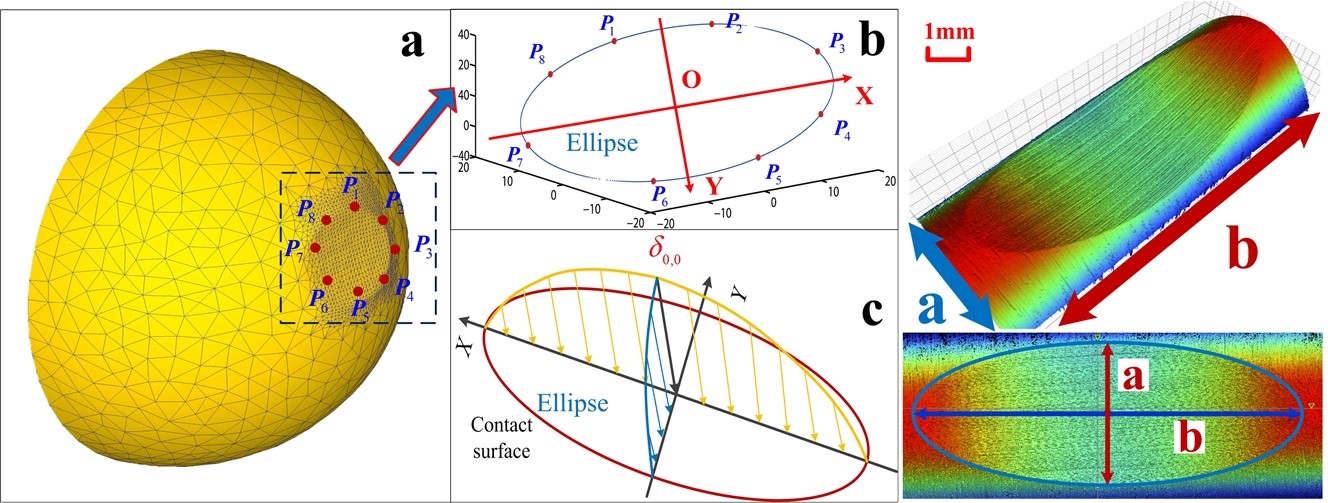
2023年6月1日,中国科学院沈阳自动化研究所在复杂曲面机器人自动化磨抛加工领域取得新进展,提出了一种基于六点定位原理的叶片坐标系自动标定方法,实现了航空发动机叶片磨抛加工过程中动态工件坐标系的自动标定。该研究成果于2023年6月1日在线发表在计算机/制造领域期刊Robotics and Computer-Integrated Manufacturing。

浙江杭机股份有限公司(简称“杭机股份”)研发的大口径光学元件超声铣磨抛成套装备,采用桥式框架移动式结构布局,具有高刚性、高精度及强大的多手段揉合功能,配置超精密闭式静压回转工作台,可自由统配超精密静压主轴、超声刀柄、磨抛头、应力盘、磁流变组合及摇臂式轮廓度仪等关键部件,设备配置有寻边定位系统,可快速定位光学元件坐标,提高工作效率。设备可对3米级光学元件进行超精密铣磨加工、多自由度快速研抛及高精度测...
中国科学院工程热物理研究所专利:一种抛物槽式太阳能集热装置
中国科学院工程热物理研究所 专利 抛物槽式 太阳能 集热装置
2023/5/22
中国科学院工程热物理研究所专利:一种抛物槽式太阳能集热装置
中国科学院宁波材料技术与工程研究所在磨抛机器人方面取得进展
磨抛 机器人 力控 末端执行器
2023/3/27
磨抛是典型的连续接触式操作,力控技术直接影响磨抛效率和质量,因而至关重要。传统上,一般采用基于机器人关节力矩的直接力控方法,存在力控精度低、动态响应慢等缺点。而机器人加力控末端执行器的间接力控方法采用了宏微系统结构,在小范围内动作时只需调整力控末端执行器的位姿即可,避免了宏机器人大惯性动作对力控精度和动态响应的影响,可有效解决直接力控方法存在的问题。目前,虽然有研发机构或公司研制了力控末端执行器,...
宁波材料所在磨抛机器人方面取得进展(图)
磨抛机器人 系统结构 氮气弹簧
2023/7/13
磨抛是典型的连续接触式操作,力控技术直接影响磨抛效率和质量,因而至关重要。传统上,一般采用基于机器人关节力矩的直接力控方法,存在力控精度低、动态响应慢等缺点。而机器人加力控末端执行器的间接力控方法采用了宏微系统结构,在小范围内动作时只需调整力控末端执行器的位姿即可,避免了宏机器人大惯性动作对力控精度和动态响应的影响,可有效解决直接力控方法存在的问题。目前,虽然有研发机构或公司研制了力控末端执行器,...

2022年11月23日,2022世界智能制造大会发布了“2022世界智能制造十大科技进展”“2022中国智能制造十大科技进展”共20项智能制造科技成果。其中,中国科学院沈阳自动化研究所“变刚度薄壁复杂曲面零件机器人智能磨抛”技术入选“2022中国智能制造十大科技进展”。
机器人自动化航空叶片磨抛加工研究获进展(图)
机器人 自动化 航空叶片 磨抛加工
2022/9/21
近日,中国科学院沈阳自动化研究所在机器人自动化航空叶片磨抛加工领域取得新进展,提出了一种非线性材料去除深度理论模型,实现了机器人自动化航空叶片磨抛加工过程中的逐点精准材料去除控制策略。相关研究成果发表在Journal of Manufacturing Processes上。
2022年4月,中国科学院沈阳自动化研究所在机器人自动化航空叶片磨抛加工领域取得新进展,提出了一种非线性材料去除深度理论模型,实现了机器人自动化航空叶片磨抛加工过程中的逐点精准材料去除控制策略。该研究成果于2022年发表在制造领域权威期刊Journal of Manufacturing Processes。航空发动机是飞机制造的关键部件,而航空发动机叶片是航空发动机的重要组成部分。在发动机运行过程...

浙江省机器人与智能装备技术重点实验室成果:应用于机器人磨抛的力控末端执行器(图)
机器人 力控 末端执行器 磨抛过程
2023/3/16
机器人磨抛作业属于连续接触式加工,在磨抛过程中不仅要对机器人进行精确的位置控制,还要进行接触力控制,以提高加工精度。目前工业机器人进行力控制的方法主要有两种,即通过控制机器人关节力矩的直接力控法和利用机器人外部附加装置的间接力控法。前者需要建立准确的机器人动力学模型,并且机器人的大惯性会影响力控的动态响应速度和精度。后者可通过增加一个具有力控制功能的末端执行装置,与机器人通过宏微协调实现精准的力控...
徐某涉高空抛物罪刑事一审案件刑事判决书
徐某 涉高空抛物罪 刑事判决书
2022/1/12
被告人徐某,男,1990年1月7日生,XX,大学文化程度,腾竞体育文化发展有限公司部门负责人,户籍在四川省成都市成华区,住上海市静安区。因实施谎报案情的违法行为于2021年11月11日被上海市公安局黄浦分局处行政拘留五日,并处罚款二百元。因涉嫌犯高空抛物罪于2021年6月17日被上海市公安局静安分局刑事拘留,同年7月23日被上海市公安局静安分局取保候审,同年11月3日被本院取保候审,同年11月19...
高空抛物罪的司法认定――北京通州法院判决王某高空抛物案
高空抛物罪 北京通州法院 司法认定
2021/8/24
高空抛物罪的构成应结合客观行为、主观恶性、抛掷物品高度、危害后果等因素综合加以认定。