
搜索结果: 1-15 共查到“控制科学与技术 驱动”相关记录163条 . 查询时间(0.172 秒)
中国科学院沈阳自动化研究所专利:一种混合驱动水下机器人用可折叠螺旋桨装置
中国科学院合肥物质科学研究院专利:一种体内微机器人的外磁场驱动系统
中国科学院合肥物质科学研究院 专利 体内微机器人 外磁场 驱动系统
2023/12/12
中国科学院合肥物质科学研究院专利:一种体内微机器人的外磁场驱动系统
中国科学院深圳先进技术研究院专利:一种多通道微型泵装置及其驱动方法

中国科学技术部与德国联邦教育和研究部于2018年签署《智能制造科技创新合作的联合意向声明》,成立中德智能制造科技创新合作联盟,并将“研究成果转化为标准”列为重点合作领域之一。为贯彻落实相关合作任务,推动《十四五智能制造发展规划》顺利开展,在10月20日北京举办的“2023中德智能制造科技创新合作峰会暨联盟年度大会”期间,召开了《智能制造效能通用评测方法》标准编制工作组成立暨第一次工作组会议。来自中...
中国科学院合肥物质科学研究院专利:在高温真空环境下使用的机器人的驱动机构
中国科学院上海应用物理研究所专利:一种控制棒驱动机构的落棒系统及方法
中国科学院上海应用物理研究所专利: 一种双驱动压辊式压弯装置
中国科学院上海应用物理研究所 专利 双驱动 压辊式 压弯装置
2023/7/19
中国科学院上海应用物理研究所专利:一种双驱动压辊式压弯装置
中国科学院上海应用物理研究所专利:一种双驱动压辊式压弯装置
中国科学院上海应用物理研究所 专利 双驱动 压辊式 压弯装置
2023/7/19
中国科学院上海应用物理研究所专利:一种双驱动压辊式压弯装置
由于冗余驱动的存在,冗余驱动并联机器人系统逆动力学模型存在无限组可跟踪期望轨迹的控制力矩解,这使得机器人在运行过程中具有完成附加任务的能力.以实现骨科机器人的安全精准操控为目的,提出了基于变阻抗控制的冗余驱动并联机器人多目标内力优化方法.首先,采用支链分解法对冗余驱动并联机器人的动力学进行建模。
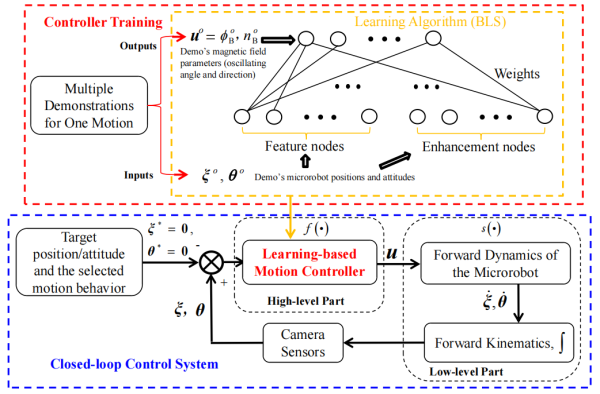
近日,中国科学院深圳先进技术研究院副研究员徐升和研究员徐天添团队合作,提出了一套针对微型仿鱼磁驱动机器人的复杂运动学习控制方法,通过宽度学习网络训练获得了可控磁场变化与仿鱼机器人多种动作基元之间的关系规律,实现了仿鱼机器人的复杂运动,而且该方法无需复杂调参,并具有优异鲁棒稳定性,保障了运动过程不受外界扰动影响。相关研究成果以A Robot Motion Learning Method Using ...

中国科学院深圳先进院提出针对微型仿鱼磁驱动机器人的复杂运动学习控制方法(图)
微型仿鱼 磁驱动机器
2023/5/31
2023年5月18日,中国科学院深圳先进技术研究院副研究员徐升和研究员徐天添团队合作,提出了一套针对微型仿鱼磁驱动机器人的复杂运动学习控制方法,通过宽度学习网络训练获得了可控磁场变化与仿鱼机器人多种动作基元之间的关系规律,实现了仿鱼机器人的复杂运动,而且该方法无需复杂调参,并具有优异鲁棒稳定性,保障了运动过程不受外界扰动影响。相关研究成果以A Robot Motion Learning Metho...
中国科学院工程热物理研究所专利:一种步进电机驱动的高可靠燃油计量装置

中科院上海分院宁波材料所在Accounts of Materials Research上发表综述“碳基Janus薄膜―用于传感、驱动及其一体化柔性智能器件”(图)
宁波材料所 碳基Janus薄膜 传感 驱动 一体化柔性智能器件
2023/2/4
Janus薄膜由于具有不对称的结构和独特的物理或化学性质,在传感、驱动、能源管理和先进分离等方面表现出了巨大的应用潜力。其中,仿生柔性皮肤由于兼具灵敏感知、驱动和功能集成等特点,已经引起了人们广泛的研究兴趣。为实现这些特定的功能,需要选择合适的活性功能材料并以可控的方式形成不对称的结构。碳纳米材料由于具有优异的导电和导热性能、本征机械柔韧性、高化学和热稳定性、易于加工等优点,是一种极具应用前景的活...

2022年6月25日,由北京理工大学牵头承担的国家重点研发计划项目“数据/模型混合驱动的生产线智能协同与自主决策理论”项目启动暨方案实施论证会在线上腾讯会议顺利召开。