
�������: 1-10 ���鵽��������ѧ�뼼�� ˮ��������ؼ�¼10�� . ��ѯʱ��(0.146 ��)
�й���ѧԺ������ѧ�����о���ר����һ��ˮ�����п���������ɢ���ܵIJ���װ��
�й���ѧԺ������ѧ�����о��� ר�� ˮ���� �������� ��ɢ����
2024/1/31
һ��ˮ�����п���������ɢ���ܵIJ���װ�ã�����һ���ܷ����أ����ص��ϲ��ܷ�̶��п������崫����̽ͷ���¶ȴ����������صײ��н��轰�������ڲ��ǿ�װ���������IJ����ң���Χ�����к���ˮԡ���ס���װ�û�����һ̨��������崫�����ź������ļ����������һ��ͨ����ͨ�����������������Ʊ�����������Һ�ĺ���ƿ��һ̨���������¶ȴ������ź������ĺ�������һ̨������������һ��N2��Դ��һ������������Դ���������...
�й���ѧԺ�½����������о���ר����һ�����ڻ�ѧ��ɫ���������Ŀ����Ͱ�ɫˮ���������Ʊ�����
�й���ѧԺ�½����������о��� ר�� ��ѧ��ɫ������ ������ ��ɫˮ����
2023/12/7
�������漰һ�����ڻ�ѧ��ɫ���������Ŀ����Ͱ�ɫˮ���������Ʊ���������ˮ�������ɾۺ��ﵥ�塢ˮ�������������������Ƴɣ����ۺ��ﵥ��Ϊ1‑��ϩ��‑3‑��������ͱ�ϩ�ᡢ������������������ˮ�н����ϣ��õ�����ɨ����Ȼ���벣��ģ���У���ͨ�����ɻ��ۺ����¶�70���¼��ȣ��γ�ˮ�������ۺ��ﵥ��Ϊ��ϩ���1‑��ϩ��‑3‑��������...
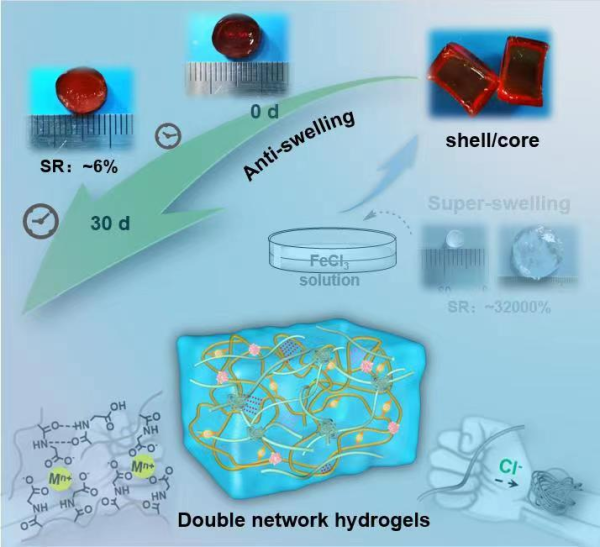
ˮ������Ϊ������ά��������ṹ�����߷��������ϣ�������ҽ�á��������͵�ѧ����������Ӧ�ù㷺��Ȼ����Ŀǰˮ�������������ٻ�е���ܽϲ�ṹ�����ܵ����ֶθ��ӵ����⣬������Ч���㸴������������ҽѧ�������еĹ�������˫����ˮ��������������ṹ��ѡ������Ժ�����������Ч���ڹ�����ǿ���ܻ�ˮ�������о��б��ܹ�ע�������������������������Ǹ������������ḻ�����ԣ����������ԡ��̼���Ӧ�ԡ��ɼӹ����Լ���...
�й���ѧԺ�Ϸ����ʿ�ѧ���Ŷ��ڿɴ���ˮ������Ƭ����Һ�������Ӿ���ⷽ��ȡ����ͻ�ƣ�ͼ��
ˮ������Ƭ �����Ӿ���� �ɴ���������
2023/7/22
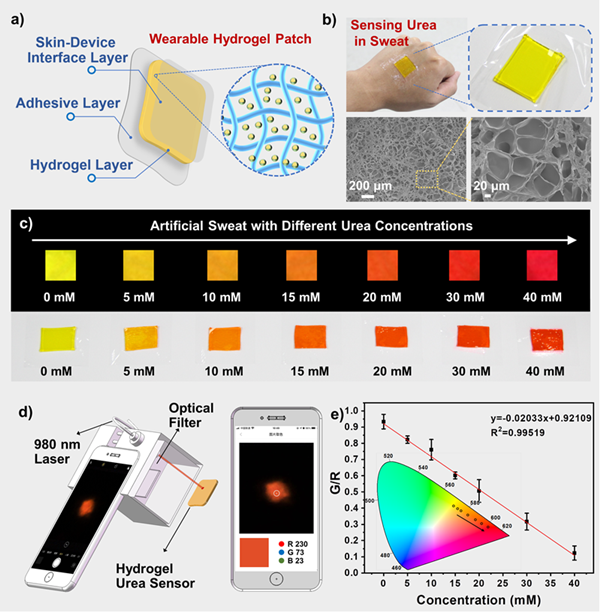
2023��2��15�գ��п�Ժ�Ϸ��о�Ժ��������Դ���������������о����������о�Ա�Ŷ��ڿɴ���ˮ������Ƭ����Һ�������Ӿ���ⷽ��ȡ���½�չ��ͨ������ά��۱�ϩ������PAM��ˮ������Ƕ����ת����ѧ̽�룬����Ʊ�һ�ֿɴ���������Ƭ����������Ƭ�������ֻ�����ɫʶ������ϣ�ʵ�ֶ����ص��ֳ����ٶ�������������о��ɹ������ڹ��ʷ�������TOP�ڿ�Analytical Chemistry�ϡ�
ɽ����ѧ����ѧԺǮ�������Ŷ���ҽ�ơ������������ˮ�����������о���ȡ���½�չ��ͼ��
ɽ����ѧ����ѧԺ Ǯ�� ҽ�� ������� ����ˮ���������� Journal of Materials Chemistry A
2022/12/20
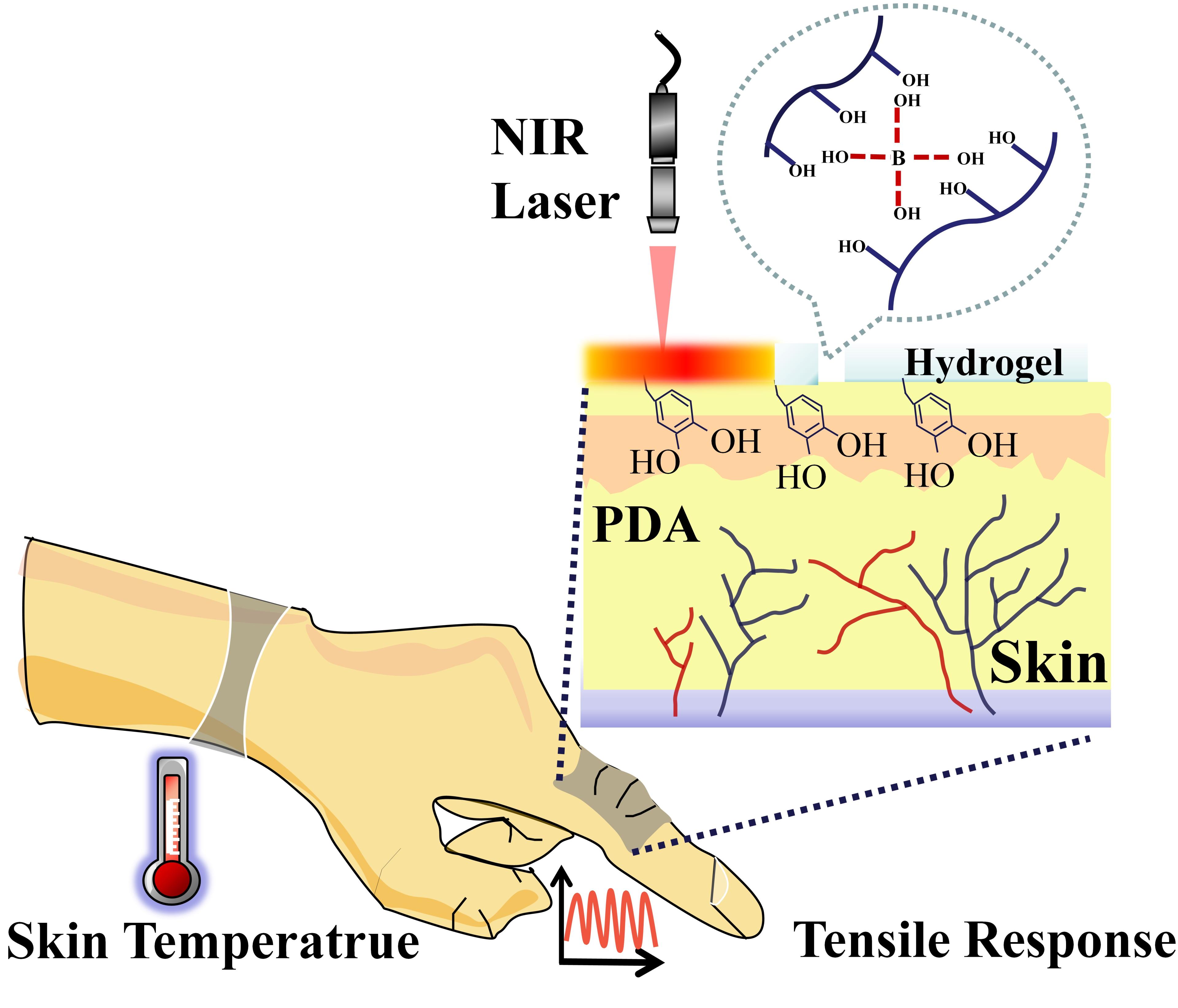
���գ�ɽ����ѧ����ѧԺǮ�������Ŷ���ҽ�ơ����������������Դ������о���ȡ���½�չ������������Ӧ����¶�ʵʱ���Ķ��ˮ��������������سɹ��ԡ�Wearable, fast-healing, and self-adhesive multifunctional photoactive hydrogel for strain and temperature sensing��Ϊ�⣬������Journa...
�й���ѧԺ�������ϼ����빤���о���������������������˸�֪����Ƥ��ˮ�����������о��л��չ��ͼ��
������������ ������ ��֪����Ƥ�� ˮ����������
2022/9/14
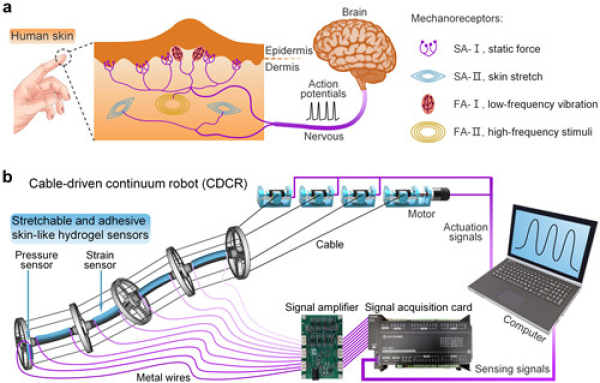
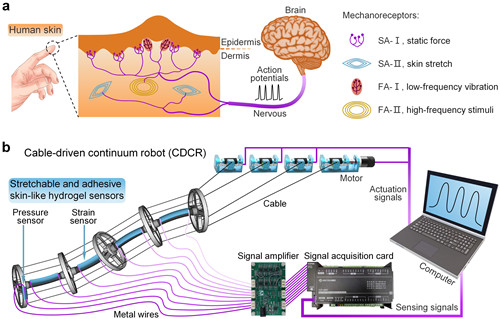
����������������ˣ�CDCR������Ҫ����������ˣ����нṹ���ɡ���ȫ�����ɶȸߵ��ص㣬�ܹ����������������ԺͿ������Բ��������������Ťת���εȶ����������������խ���ӵĻ����кܺõع�����Ŀǰ��CDCRϵͳ�г��õĹ��˲������դ������ģ���ߡ��쳤�ʼ��͡�ȱ��ճ�����ƣ���������������˵��˶�����������˷ֲ㣬��ʹ���ָ��ԵĴ��������ʺϼ���ϵͳ�����������Կ�𤸽������������CDCR���Ը�֪�����˶���...
�п�Ժ�Ϻ���Ժ����������������������������˸�֪����Ƥ��ˮ����������ȡ�ý�չ(ͼ)
���������� �����˸�֪ Ƥ��ˮ���� ������
2022/12/19
����������������ˣ�CDCR����һ�ַdz���Ҫ����������ˣ����нṹ���ɡ���ȫ�����ɶȸߵ��ص㣬�ܹ����������������ԺͿ������Բ��������������Ťת���εȶ������������������խ���ӵĻ����кܺõع�����Ȼ��ĿǰCDCRϵͳ�г��õĹ��˲������դ������ģ���ߣ��쳤�ʼ��ͣ�ȱ��ճ�����ƣ��������������������˵��˶�������������˷ֲ㣬��ʹ�����ָ��ԵĴ��������ʺϼ���ϵͳ�����������Կ�𤸽������������CD...

����������������ˣ�CDCR����һ�ַdz���Ҫ����������ˣ����нṹ���ɡ���ȫ�����ɶȸߵ��ص㣬�ܹ����������������ԺͿ������Բ��������������Ťת���εȶ������������������խ���ӵĻ����кܺõع�����Ȼ��ĿǰCDCRϵͳ�г��õĹ��˲������դ������ģ���ߣ��쳤�ʼ��ͣ�ȱ��ճ�����ƣ��������������������˵��˶�������������˷ֲ㣬��ʹ�����ָ��ԵĴ��������ʺϼ���ϵͳ�����������Կ�𤸽������������CD...

�й���ѧԺ�������ϼ����빤���о����ڸ�ǿ�͵���ˮ��������������ȡ�ý�չ��ͼ��
�й���ѧԺ�������ϼ����빤���о��� ��ǿ�� ���� ˮ���� ������
2018/10/23
�й���ѧԺ�������ϼ����빤���о����о�Ա�����Ŷ��з���һ�ֻ��ڸ�ǿ�ȵ���ˮ���������Ը�������Ӧ�䴫��������ʹ�õĵ��������������Եı�ϩ����-����ϩ�������������P(AAm-co-HEMA)����ԭλ���ɵĸ��Ծ۱�����PANI����ɵİ뻥������ˮ����������P(AAm-co-HEMA)��PANI֮�������������ʵ�����Ծ�Ե��������Ե�������֮��Ľ��ܽ�ϣ�ͼ1a�������������Ļ�������ṹ��ͼ1b��1...
����һ�ֶ����ⶨҽ�þ۱�ϩ����ˮ������Ʒ�б�ϩ���������ķ����� �������ø�ЧҺ��ɫ�����ҽ�þ۱�ϩ����ˮ������Ʒ�б�ϩ�����ĺ����� ��������ֲ�ͬ��������ϵ�ⶨ�Ľ���ֱ�Ϊ��1��72 x 10������5�� g/g��0��9%NS��pH=3��7����2��65 x 10������5��g/g (0��9%NS��pH=7��0 )��6��43 x 10������6��g/g��100%�״� �������ۣ�����������ȷ�����٣�����...
�й��о����������а�-��
- ���ڼ���...
�й�ѧ���ڿ����а�-��
- ���ڼ���...
�����ѧ���л������а�-��
- ���ڼ���...
�й���ѧ���а�-��
- ���ڼ���...
�ˡ���-ƪ
- ���ڼ���...
�Ρ���-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
�������� -ƪ
- ���ڼ���...
֪ʶҪ��-ƪ
- ���ڼ���...
���ʶ�̬-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
ѧ��ָ��-ƪ
- ���ڼ���...
ѧ��վ��-ƪ
- ���ڼ���...