
�������: 1-15 ���鵽����е���� �˶�ѧ����ؼ�¼16�� . ��ѯʱ��(0.215 ��)
��е����ĿǰӦ�����Ĺ�ҵ�����ˡ������е����һ����������������˻������Ĺ�ҵ��е�ۣ����˶�ѧ���������������ǻ����˿��ƹ����еĻ������⡣��ѧ��е��ʵ�������ӼѸ��о�Ա��µ����ǰ����о�����Hofbaur���ڵ��˺�����������һ�������е�۵��˶�ѧ������ı���ʽ�⡣��������Gr��bner���ȹ��߸������꾡�Ļ�е���˶������Է�������ع����������˶����ڿ�IEEE Transactions on R...
���ϴ�ѧ������ѧ�����μ������� �������˶�ѧ��
�����ѧ��е����ѧԺ��е����ʵ��μ�ʵ��13 ��е�˶�ѧ������ѧ��������
�����ѧ��е����ѧԺ ��е����ʵ�� �μ� ʵ��13 ��е�˶�ѧ������ѧ��������
2015/12/22
�����ѧ��е����ѧԺ��е����ʵ��μ�ʵ��13 ��е�˶�ѧ������ѧ�������ԡ�
������λ�þ��ȼ��Ϊ���������,���ĩ��λ��ָ������ʵ�ʾ���֮�����Ϊ�ﵽ������˾��ȵ�Ŀ��,��Ի������˶�ѧ�������в��������в��ü�������Ǽ������˾������,ͨ���о��ó��Ļ����˾������ģ�ͺ�ʵ�ʵ��˶�ѧ������ӳ�䡣Hayati����������Ļ�����D-H�˶�ѧģ����ijЩ�����Dz����Ա�ʶ��,�����ʶ�����������������,ͨ������������,���˻����˾�������˶�ѧ����ģ���в��ɱ�ʶ�IJ�����...
�Զ�װ���е�ֵ��˶�ѧ���������
�Զ�װ��ϵͳ ��е�� �˶�ѧ
2015/11/3
���о���е���˶�ѧ�������˶�ѧ���̵Ľ�����켣�滮һֱ���о��ص���ѵ㡣Ϊ�о�ij��ھ����л����Զ�װ���е�ֵ��˶����ɣ�����D-H�������������˻�е��ϵͳ���˶�ѧģ�ͣ�����û�е�ֵ��˶����̡���Matlab�����£�����Robotics toolbox����������˳�����䣬�Ի�е�ֵĹ켣�滮�����˷��棬ֱ�۵���ʾ�˻�е�ָ��ؽڵ��˶����̼��켣�����ö���ѧ��������Recurdyn�ڹ涨����ʱ���½���...
�������������ܼӹ����̷��淽��ͨ���Բ������,���һ�ֻ��ڻ����˶�ѧģ�͵�������ܼӹ����̷��淽���������ö���ϵͳ�˶�ѧ���۶�������ܻ����л����˶�ѧ�����Ļ�����,����������������ܻ��˶������ͽṹ��������Ϣģ�ͼ������˶�ѧģ��,����Newton-Raphson��������������ܻ������˶�ѧ���̽������,������������ܻ��˶��͵��ܶ�̬���ε��˶��滮�㷨,ʵ��������ṹ��ͷ������ܻ��ļӹ����̷��档...
Ϊ����̽������˵ĵ������ٿ���,����˲���ת��ĸ���ʽ�ƶ��������˶�ѧģ�͵Ĺ�������ⷽ����ͨ���Բ���ת��ʽ�ƶ�ϵͳ�ṹ���˶����Խ��з���,�Ƶ���̽������˳����ٶ�����ּ��������ٶ�֮��Ĺ�ϵ����,�������Householder�任�����˶��ķ���,Ϊ̽�������Խ�Ϲ�����λ�úͷ�λ�Ĺ����ṩ�˽�ȷ�����ģ�͡����Բ���ת��ʽ�����˵��н����̽��з�������,��֤���˶�ѧģ�͵���ȷ�Լ�����...
�������ϴ����˻���Ϊ����,��������ֱͨ������-�ȳ���˺���������-���ȳ�������ֻ����Ĺ�������,���������ǵĶ���ѧ���˶�ѧģ�͡���4000kN�ŷ�ѹ����Ϊ��,����MATLAB�����������ŷ���еѹ�������������������˶�ѧ-����ѧ��������������������,��������-���ȳ������ֱ������-�ȳ������Ⱦ��и��õĶ���ѧ���˶�ѧ���ԣ���ͬ�ȹ���ѹ��������,��������-���ȳ���˵�����Ť�ؽ�ֱ������-�ȳ���˵�...
�Խ������Բ�����ʶ�Ķ���ѧ����ΪĿ�ģ������6��SPR���������˶�ѧ��һ�ַ������������Ƚ�����֧����Ϊ�����Ĵ���������ȷ���������Ŀռ�λ�ˡ���ι��첢������Ӱ��ϵ��������������Ӿ����з�������������˶�����Ψһ���������������������ʾ������ƽ̨Ϊ���������ۼ��㣬����ADAMS���������˷�����֤����
���ݲ��������˻����ۺ����ۣ������һ����ʵ����������¿ռ�ת���������ɶȲ��������������˶�ƽ̨���̶�ƽ̨������֧�����Ӷ�֧����ɣ�����ƽ���ȶ�����������ǿ��λ�þ��ȸߵ��ص㡣ͨ���Ըû������˶�ѧ�о���������˶�ѧλ����⡢���⼰�ٶȽ⡣����Matlab�����������˶�ѧ������������ṩ�˸ò��������ڶܹ���Ƭƴװ���ϵ�Ӧ��ʵ����֤���ò���������ʵ����������¿ռ�����ȷ��λ��
��֫������������˶�ѧ����
����������� �˶�ѧ ����
2013/12/9
���ڼ��ز���ѵ��ԭ�����о���֫���������������ϵͳ.�����֫����ѵ�������˲����ڹ̶�����,���ó���ķ��������˶�ѧ���������ѵ����⣬����ο�����ϵ������任��������֫����ѵ���������˶�ѧģ��,�Ƶ�������ѵ�������������˶�ѧ��ʽ.���滮��̬�켣,����ADAMS���������˶�ѧ�����˫��������������������飬��֤���˶�ѧģ�ͼ����Ƶ���ʽ����ȷ��.
���ڣ�����衢������˶���ϸ�������һֱû�б�����ͽ����ʹ�����е�������������б�����ø��ӡ��ӹ����ѵ�����ִ��������������衢����������˶�������Ҫ�������������˫������ԭ������˲�������ִ���ʵ�֣�����裭���������������������Ĺؼ����⣬�������ͨ����ֱ��Բ�����ִ�����ʽ��������ӹ����ܿ�������ִ������Ӻͼӹ����ѵ����⣮���⣬�������Ƶ����������ڻ��������Ա���Ʒ���Ҳ�в�...
�����������˶�ѧ��������������뿪��
VRML ���������� �˶�ѧ ����
2008/3/30
Ϊ��ߺ�����ٵ�Ч��,���ͺ��ӳɱ�,��չ�˻����������˶�ѧ������о�����ʵ�����л�����Ϊ�����ɶȵĻ���������,Ӧ��Pro��engineer�������л����˵��彨ģ,�����߸�����,Ȼ���뵽VRML�н�������ƶ�,��VRML��ÿ��������Ϊһ����㡣��MATLAB������������������,�˶��Ƕȼ�λ�õľ�ȷ�ƶ�Ҳ����MATLAB���о�������,����D-H�����ʹ������������˵��˶�ѧ�����⼰������⡣���VR...
���ݴ��������Ͳ����������ص㣬����ƽ��һת����������Ϊ���壬�����һ�������ɶȻ��������ˣ��û����˶�ƽ̨���ɶ�Ϊ��ƽ�ƺ�һת����ͬʱ���ڲ���������ƽ̨������̶�ƽ̨������һ����֧�����ø���֧�����ж�����ת�����ɶȡ������ͬ���˶����ԵIJ���������ȣ��û����˵Ĺ����ռ��ת���������˸û����˵��˶�ѧ�����������λ�����������⣬�����˶�Ӱ��ϵ�������ٶȺͼ��ٶȽ�����ϵͳ�о����������˶�̬������֤��
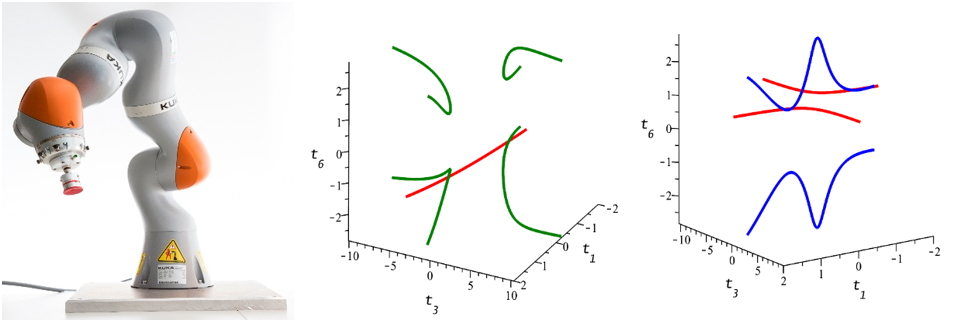
Ϊ���һ��6R���������˶�ѧ�㷨�ľ��Ⱥ�Ч�ʣ����һ�ֻ��ڷ�������;���ֽ���Ż��㷨����6���������˶�ѧ�������任�����÷�������Ԥ�����õ�14�����˶�ѧ���̣�������������������ۻ�����������6��������ؽڱ���3�ص��ص㣬��Ŀ������24���͵�16�ף������Ĺؽڱ�����3�����ӵ�4���� ��һԪ16�η����������ת��Ϊ���������ֽ����⣬��ѡȡ�ϸ����������������Ԫ�ؼ���ؽڱ�������һ���������...
�й��о����������а�-��
- ���ڼ���...
�й�ѧ���ڿ����а�-��
- ���ڼ���...
�����ѧ���л������а�-��
- ���ڼ���...
�й���ѧ���а�-��
- ���ڼ���...
�ˡ���-ƪ
- ���ڼ���...
�Ρ���-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
�������� -ƪ
- ���ڼ���...
֪ʶҪ��-ƪ
- ���ڼ���...
���ʶ�̬-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
ѧ��ָ��-ƪ
- ���ڼ���...
ѧ��վ��-ƪ
- ���ڼ���...