
�������: 1-15 ���鵽����е���� ��������ؼ�¼24�� . ��ѯʱ��(0.112 ��)
��ʵ����������ˮ½���������������˶������ˣ������������ģ�顢����ģ�顢�Ȳ�ģ�飬�����������ģ�������������Լ���װ����������ڲ��Ŀ������壬��������ģ�����ǰ������ͷ������ǰ������ͷ��װ���������ģ����������ǰ�࣬�����������ģ�����������������������Ȳ�ģ�飬�����Ȳ�ģ�����װ������������ʵ�����Ͳ������Կ������Ȳ���Ӧ���ӵ��ͣ������������żⲿλ��װ����������ˮ���н���ǰ������ͷ�ֿ���...

����������ѧ�����Խ�������������������۷丹�����λ���������������ƣ�ͼ��
�������� �Խ��� ���� �۷丹�� ���λ��� ���������
2023/12/11
2023��6��2�����ߵ㣬����ʮ����ũ����̳����У��ֲ��¥���������С�����������ѧ��е�복��ѧԺ�����Խ���������ϯ��������Ϊ����������������۷丹�����λ���������������ơ��Ľ��������λ��������ͬѧ���֡�

�������Ŷ��з������������������ˣ�Micro/Nano-motors, MNMs�����û�������Ϊһ�־��������˶����ܵ����ܻ�����ƽ̨����Ϊһ�ֱ���Ե��¼��������㷺Ӧ���ڰ���ҩ����͡������������ﴫ�С���ˮ������ڶ�����

�й���ѧԺ��ѧ�о��������ֿ���������3D��ӡ�Ʊ�������Ч����̫������������ʵ��ũҵӦ�ã�ͼ��
3D��ӡ ���� ����̫���������� ũҵӦ��
2021/8/16
������ڹ�����Ȼ��ѧ����ί���Ƽ������й���ѧԺ�Ĵ���֧���£��й���ѧԺ��ѧ�о�����ɫӡˢʵ���������ֿ����������Ա��ǰ������3D��ӡ����������ά�β��Գƽṹ������ϵ��ʵ�ָ��ζ��¸�Ч̫�������ú�ˮ�����Ļ����ϣ���һ����Ƴ����Ź���̫������������ʵ����������һ���Ʊ�����������������ͺ����Լ��ڸ��ζ��µij��ڿ����ԡ�
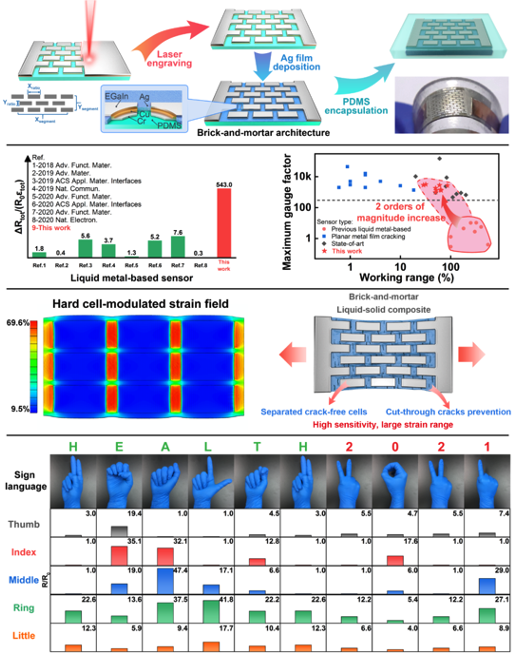
�廪��ѧ���������ڿ���������ΰ��������о���Ա�ܱ�����������������ڳ��켤����-���ĸ������켼������Һ̬�������������Ͻ�EGaIn������������Ĥ��Ϲ�����ש-��ʽ��Һ˫�ౡĤ��������Ӧ�䴫�С�
�Ͼ����պ����ѧ2021��˶ʿ�о������������������Ŀ������ѧ�뼼���������Դ��
�Ͼ����պ����ѧ 2021�� ˶ʿ�о��� ���� ���� �������Ŀ ������ѧ�뼼������ ���Դ��
2021/1/11
�Ͼ����պ����ѧ2021��˶ʿ�о������������������Ŀ������ѧ�뼼���������Դ�١�
����863��Ŀ����ģ̬�������ܻ����˻���������˶����ơ���ͼ��
863��Ŀ ��ģ̬ ���� ���ܻ����� ������� �˶�����
2023/4/6
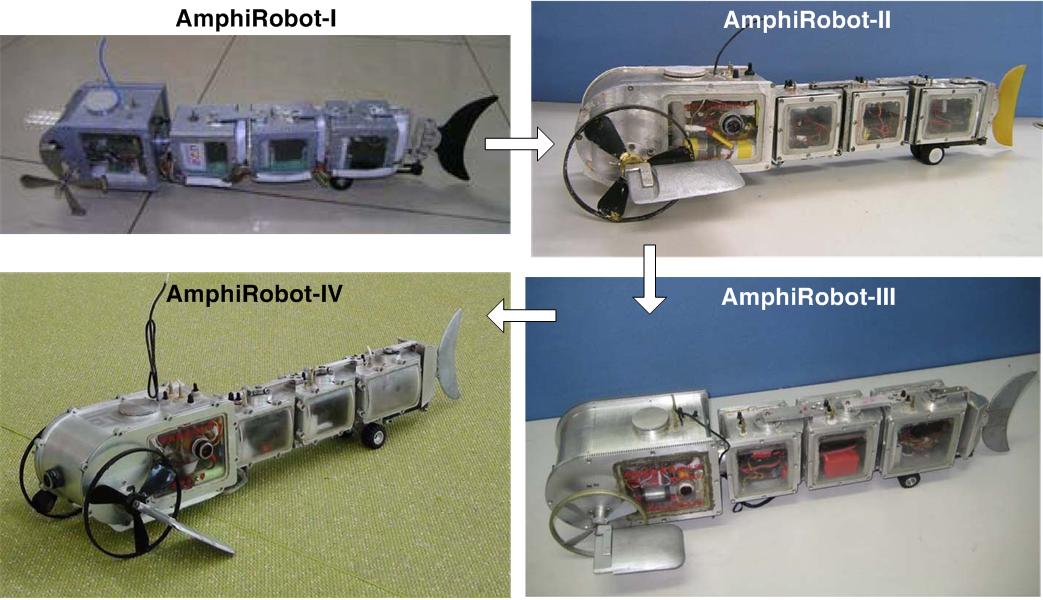
�ɹ��ܵ�����863��Ŀ����ģ̬�������ܻ����˻���������˶����� ��֧�֡�ͨ���������º�ϵͳ���ɣ��Է����ƽ�����Ϊ�����������֡�������һ�廯�ƽ����������ƾ��п����ζ����ܡ�ǿ��Ļ�����֪���ܼ����õ�ˮ½������Ӧ���������ܷ�������ˡ�
�Ϸ��Ƽ���ѧ(��ơ��Ͽƴ�)2020��3��2����˼�ý��¶����У��ѧԺ��е����Դ����ϵ���������������۴�ѧ��������������������VAYU Fish(��ơ�VAYU��)��������26.79��ijɼ������ˡ�������50�������Ӿ�������¼������á�����˹�����¼����֤���ݽ��ܣ����������˼����о��漰�����ϡ�������ơ�����ѧ�����ӡ����ƺͼ������ѧ�ȶ�����ѧ�ơ���ˮ���о��������������㲻ʹ�ô�ͳ...
���գ���е����ѧԺ���¸����ڡ��ν������о�Ա�Ŷ���������������ȡ����Ҫ��չ���о��ɹ������������ڹ��������ڿ���Advanced Functional Materials���͡�ACS Nano���������¹ʵ�Ƶ��������ҵ��ˮ�IJ����ŷ��γ��˴�����ˮ����������صĻ�����Ⱦ��������ʧ��Ϊ��Чȥ�������ˮ�渡�ͣ������Ŷ������һ����ʳ�ο���Ϊģ�幹������ˮ/�����Ͷ��PVDF�CMWCNT�����̼����...
�廪��ѧ��еϵĦ��ʵ�������Ͽ��������������𤸽�о���ȡ���³ɹ���ͼ��
�廪��ѧ��еϵĦ��ʵ���� ���Ͽ����� ��շ���𤸽 �ռ价��
2017/4/14
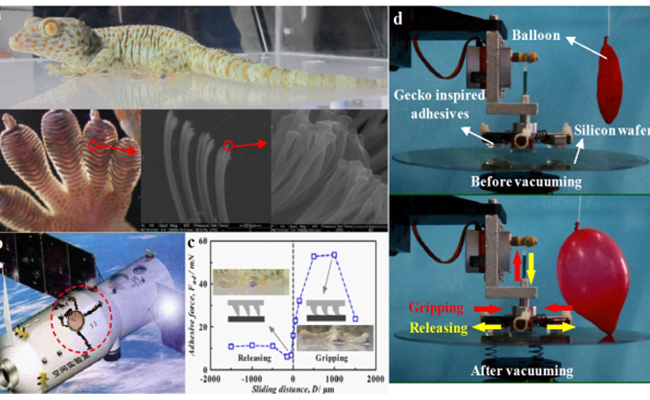
��ϣ����ѧ������ʿ����ڡ��������ʷ��һ���жԱڻ�Խ���������������������������о����ֱڻ�������������ҪԴ�ڽ��ƶ�ȼ���ë�ṹ������ķ��»������ã�ͨ����ֺ����;������Կ���ǿ𤸽�����Ѹ������ڷ��»�������Ȼ�����ձ���ڣ��±ڻ���𤸽���治�������ڴ��������µ����ڻ����ˡ��г����ȣ���������չ���ռ价����Ӧ�ã����Ա���ס��ռ��������ա��ռ�פ��ƽ̨ά�������˵ȡ�Ŀǰ������𤸽������Ҫ�ÿ�ʴ-��...
���һ�ֻ�����ֵͼ������֫�����ؽڿ�����е�������ֲ���ͳ��֫��̱�Ʒ��еIJ��㣬ͬʱʵ�ֵ����������2 ���ؽڣ��ṹ������ʵ�֡�ͨ����������������ʱ�IJ�̬��ȷ���˸��ؽڵ�ʵ�ֻ������ͣ����������������Ը��ؽ�ʵ�ֻ����ĸ��˸˳�������Ƽ��㣬����FFT(���ٸ���Ҷ�任)��ѧ���ߣ���ȡ����������������ߵ�����������Ӧ��Matlab ��̶��Źؽں�ϥ�ؽڽ�����Ƽ��㣬�ɴﵽ���Ŀ�ꡣ�������������÷���...

������������˹��Atlas������Ƶ���˶����������͵����Ż�����ӡ����̣����ܶ�ר�����ص���ڹ����Ե�С�ͻ������ϣ���Ϊ�����ܵ�����ͻ�����ȥ���˵ĵط������������˹̹����ѧ���������ɲ���ʵ���ҹ������������ڿ�����һ���»����ˣ������ڿ��зɣ���������ֱǽ���Ͻ��䣬Ȼ����˳��ǽ��������
Ϊ�˸��õ�����ѧ����֪�к�һ���Ĵ���ʵ������,��������У�����˾��ֲ��,�������ѧϰ��̽����ʵ����ѧԱ�Ƽ�����ѵ��ȫ����,������������������ƶ�����,�����Ե���������������ϸ���β���ƽ�,��ͨ��ʵ����֤���������������ʵ�ֵ�������β���ƽ�ģʽ���ϵġ����������㡱�ܹ���������ȷ��ʵ��dzˮ��ǰ����������DZ�Լ���������ת���ƶ�,��Ʒ��2015����ˮ�л����˴����л������ɼ���

����Ȼ�е�������֯�������ٶ��߱�������/��ѧ�ź�ת��Ϊ֫����˶��Ĺ��ܣ����磬����Ȼ���������仯��ʱ�����ź�ת��Ϊ֫���˶���
�������λ����˿�����ƽ�ء��ݴԡ�ɭ�֡�����ˮ�µȶ��ֻ������˶������λ���������Щ������������ƶ��������������뻷���Ľ������á�����о����λ������뻷���Ľ������ö����λ����˵Ŀ��ƾ�����Ҫ�����塣
�й��о����������а�-��
- ���ڼ���...
�й�ѧ���ڿ����а�-��
- ���ڼ���...
�����ѧ���л������а�-��
- ���ڼ���...
�й���ѧ���а�-��
- ���ڼ���...
�ˡ���-ƪ
- ���ڼ���...
�Ρ���-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
�������� -ƪ
- ���ڼ���...
֪ʶҪ��-ƪ
- ���ڼ���...
���ʶ�̬-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
ѧ��ָ��-ƪ
- ���ڼ���...
ѧ��վ��-ƪ
- ���ڼ���...