
搜索结果: 151-165 共查到“控制科学与技术 机器人”相关记录3093条 . 查询时间(0.195 秒)

智能矿山无人化是中国无人驾驶技术应用的重要场景之一,对实现矿山减人增安提效、促进能源绿色低碳转型有着重要意义。近日,中国科学院自动化研究所、国际先进技术应用推进中心、中国矿业大学(北京)内蒙古研究院、中科慧拓联合孵化的矿山智能运载机器人“载山CarMo”在内蒙古鄂尔多斯正式发布。据现有公开报道,这是我国首台套具备产业化标准要求的、具备完全自主知识产权的新能源运载装备。

中科院深圳先进院提出磁控仿鱼微型机器人复杂运动(图)
磁控仿鱼 微型机器人 非线性
2023/8/6
2023年5月10日,来自中国科学院深圳先进技术研究院集成所智能仿生研究中心的徐升和徐天添研究团队合作,提出了一套针对微型仿鱼磁驱动机器人的复杂运动学习控制方法,通过宽度学习网络训练获得了可控磁场变化与仿鱼机器人多种动作基元之间的关系规律,实现了仿鱼机器人的复杂运动,并且本方法无需复杂调参,并具有优异鲁棒稳定性,保障了运动过程不受外界扰动影响。
自动焊机器人工作站首次落地田湾核电
自动焊机器人 工作站 田湾核电
2023/5/25
近日,中国核工业二三建设有限公司连云港项目部与中核设计焊接研究所共同研制的全系列风管预制自动焊机器人工作站首次在田湾核电7、8号机组成功落地应用。
Academy of Mathematics and Systems Science, CAS Colloquia & Seminars:受人启发机器人与对类人人形机器人的思考
机器人 类人人形机器人 人工智能
2023/5/4
普通机器人高性能作业能力是机器人领域核心问题之一,也是其广泛高端应用的主要瓶颈。基于人类整体性能高于单元性能的机理,通过模拟人的神经机制与结构机理,研制受人启发的机器人系统,是在有限本体精度和有限传感精度下实现机器人高性能作业的有效途径。本报告将结合中国科学院自动化研究所机器人理论与应用团队的研究工作,对受人启发机器人研究的初步进展进行简要介绍,以期能够对未来类人人形机器人的研究带来启发。
路网约束下异构机器人系统路径规划方法
异构机器人系统 路径规划 路网约束 两步法
2024/1/17
由无人机(Unmanned aerial vehicles,UAV)和地面移动机器人组成的异构机器人系统在协作执行任务时,可以充分发挥两类机器人各自的优势.无人机运动灵活,但通常续航能力有限;地面机器人载荷多,适合作为无人机的着陆平台和移动补给站,但运动受路网约束.本文研究这类异构机器人系统协作路径规划问题.为了降低完成任务的时间代价,提出一种由蚁群算法(Ant colony optimizati...
加拿大开发出基于紫外线和磁力的攀爬机器人
紫外线 磁力 攀爬机器人
2024/1/17
加拿大滑铁卢大学科研人员主导开发了一种新型软体机器人,可利用紫外线和磁力在任意表面上移动,甚至可以爬上墙壁和穿过天花板。这种机器人无需外接电源,可实现远程操作和多功能性,适用于外科手术和搜索人难以到达的地方等场景。
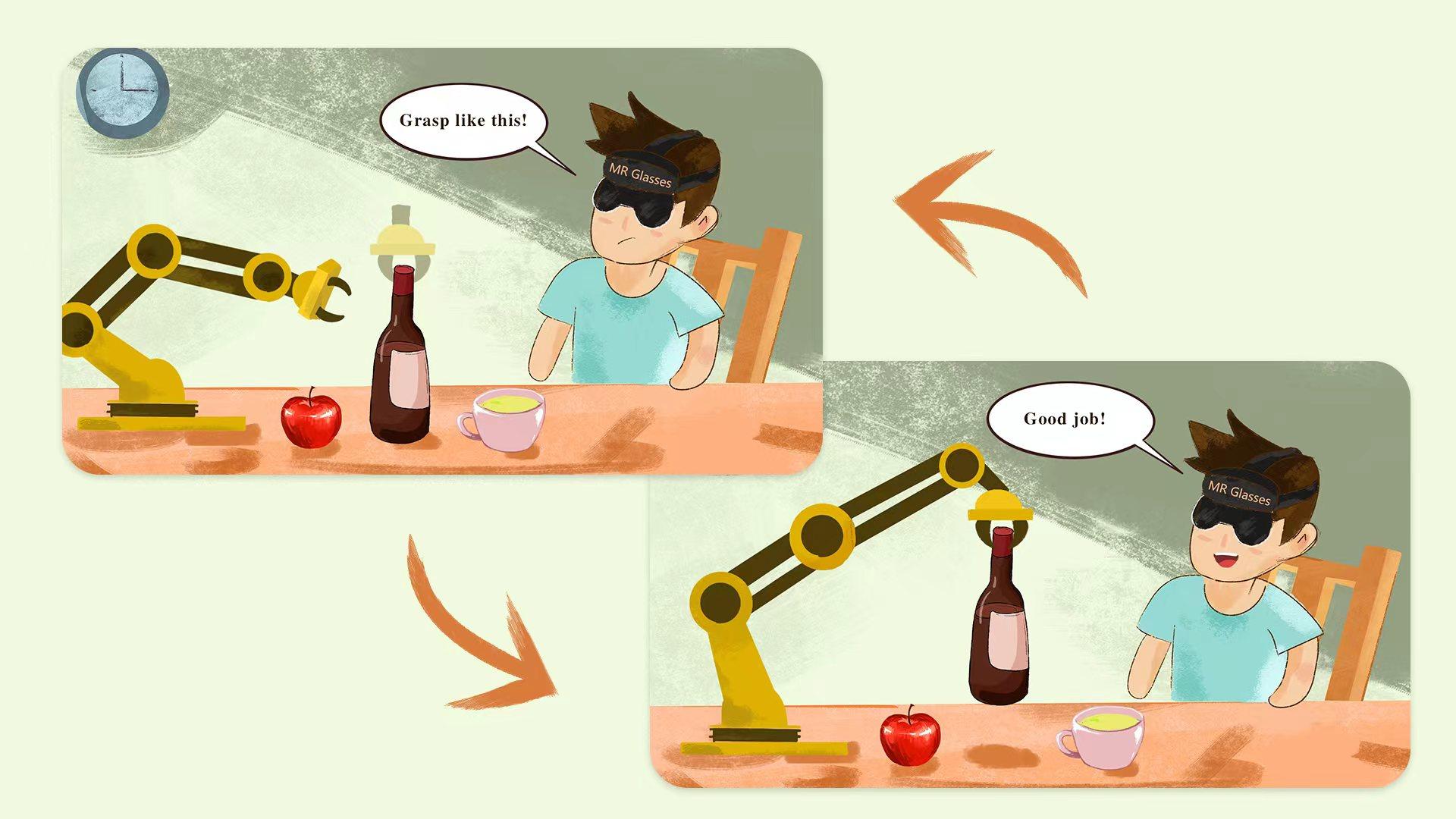
南方科技大学机械与能源工程系本科生张成杰在机器人国际期刊IEEE Robotics and Automation Letters发表论文(图)
张成杰 机器人 IEEE Robotics and Automation Letters 人机界面 机器人抓取
2023/11/30
近日,南方科技大学机械与能源工程系2019级本科生张成杰以第一作者身份在机器人国际期刊IEEE Robotics and Automation Letters发表了一篇题为“An Effective Head-Based HRI for 6D Robotic Grasping Using Mixed Reality”的文章。该研究通过创新性地将头部控制和混合现实反馈结合,设计出一套人机界面,以帮助...

移动机器人团队依托于哈尔滨工程大学CIMS研究中心(黑龙江省现代制造工程技术研究中心),以国家和地方经济建设、国防重大战略需求为导向,以移动作业型机器人为研究对象,以实现移动作业、原位测量、目标自动识别与定位、原位加工为目标,研究内容涉及智能感知、机器视觉与人工智能、目标识别与定位、环境感知与三维重建、机器人及其智能控制、智能制造、机器人采摘等。团队与中核集团所属的研究机构与企业、国投集团所属企业...

本田科研院(欧洲)王超博士受邀为东华大学机械工程学院作题为“面对人机协同的交互设计:以车联网、自动驾驶和机器人为例”的学术讲座(图)
本田科研院 王超 东华大学 机械工程学院 车联网 自动驾驶 机器人 学术讲座
2023/5/8
本田科研院(欧洲)高级科学家王超博士受邀东华大学机械工程学院作题为“面对人机协同的交互设计:以车联网、自动驾驶和机器人为例”的学术讲座。此次讲座主要面向机械工程、工业设计等专业的师生,由工业设计系杨钟亮老师主持。
科学家设计了一种可自折叠的磁性软体机器人
可自折叠 磁性 软体机器人
2024/1/17
随着微创手术的普及,患者的痛苦得到极大减轻,其术后恢复也更快。然而,微创手术器械的尺寸限制导致手术难度加大,特别是在狭窄、复杂的内部环境中操作。利用软体机器人技术可以有效地解决这个问题,特别是利用磁性驱动机器人,可以实现精确的导航、立体成像和精细操作,已成为微创手术领域的热门技术。由于导管鞘的内径和人体创口的尺寸限制,微创手术器械的大小和功能都受到了局限,难以进一步优化。近期,瑞士苏黎世联邦理工学...

第十五届国际先进机器人及仿真技术大赛现场赛圆满结束(图)
机器人 仿真 人工智能 太仓
2023/11/12
第十五届国际先进机器人及仿真技术大赛,由于疫情原因,大部分赛项于11月份转为线上举办了。由于比赛环境、比赛方式而无法在线上举办的比赛,于2023年3月25日在太仓举办了第十五届大赛的现场赛。
智能机器人在服务国家重大需求,引领国民经济发展和保障国防安全中起到重要作用,被誉为“制造业皇冠顶端的明珠”.随着新一轮工业革命的到来,世界主要工业国家都开始加快机器人技术的战略部署.而智能机器人作为智能制造的重要载体,在深入实施制造强国战略,推动制造业的高端化、智能化、绿色化过程中将发挥重要作用.本文从智能机器人的感知与控制等关键技术的视角出发,重点阐述了机器人的三维环境感知、点云配准、位姿估计、...
国外设计出新型可变形水下机器人
可变形 水下机器人 美国麻省理工学院
2024/1/17
美国麻省理工学院设计制造出一个由重复单元构成的可变形水下机器人。该小型机器人采用新型模块化系统,无需重新设计便可直接扩展尺寸。目前,大多数高密度材料在进行大尺寸应用时会产生一系列问题,而构成水下机器人系统的各单元大多是中空结构,具有低密度和高刚度特性,便于其尺寸扩展。相关研究结果发表在《Soft Robotics》杂志上。

中国科学院广州分院深圳先进院搭建机器人辅助胶体纳米晶数字制造平台(图)
深圳 机器人 胶体 纳米晶数字
2023/3/20
2023年3月6日,中国科学院深圳先进技术研究院(简称“深圳先进院”)材料所喻学锋、赵海涛团队及其合作者在国际学术期刊《自然-合成》(Nature Synthesis)上发表题为“A Robotic Platform for Synthesis of Colloidal Nanocrystals”的文章。该工作首次将数据挖掘、数据驱动自动化合成、机器学习、逆向设计集成构建了机器人辅助胶体纳米晶数字...