
搜索结果: 1-15 共查到“控制科学与技术 宁波”相关记录37条 . 查询时间(0.214 秒)

浙大宁波理工学院信息科学与工程学院胡超教授(图)
浙大宁波理工学院信息科学与工程学院 胡超 教授 自动化 传感器 图像处理 机器视觉 机器人控制
2023/7/5
胡超,三江特聘教授、博士生导师。1982年和1986年学士和硕士毕业于浙江大学电机系和光仪系;1986年始在宁波大学任教,1996年任副教授;1998年在日本参加非破坏检查技术研修。1998~2001,任宁波大学电气工程与自动化系主任;2006.6获加拿大阿尔伯特大学电气与计算机工程系博士。中科院深圳先进技术研究院博士生导师,深圳市地方级科技领军人才。主持科研项目近20项,参加10多项,包括国家8...

浙大宁波理工学院机电与能源工程学院胡东明副教授(图)
浙大宁波理工学院机电与能源工程学院 胡东明 副教授 机电装备
2023/6/30
胡东明,39岁,博士,副教授;2009年毕业于浙江大学机械电子工程专业,主要从事机电装备尤其高性能、大吨位电液驱动装备的研制与开发工作。自工作以来主持浙江省公益项目1项、市经信委项目1项、厅局级科技项目3项,参与过浙江省重大科技攻关项目1项;作为核心成员承担过国家级产品质量监督检验中心、国家能源局抽水蓄能分中心机电试验室的建设工作。曾获得厅局级科技成果二等奖1项(排名第一);截止目前在《机械工程学...

杨灿军,教授、工学博士、博士研究生导师,国务院特殊津贴专家,万人计划科技创新领军人才,浙江大学机械工程学院副院长,宁波理工学院机械电子工程“9211”学科领航教授。研究方向深海机电装备技术与人机智能机电系统技术。1997年毕业于浙江大学获工学博士学位,2004年访问美国明尼苏达大学,参加美国AT11-07航次深海科学考察活动,开展深海热液探测技术合作研究。2011年访问美国MBARI海洋工程研究所...

邱国廷,正高级工程师,本硕毕业武汉理工大学工业电气自动化、 控制理论与控制工程专业,2005年获得硕士学位。现任中国科学院宁波材料技术与工程研究所正高级工程师,曾任航天二院283厂系统测试与遥测高级工程师、历任总装车间副主任、检验计量室副主任、弹上设备管理中心副主任。

舒鑫东,硕士,高级工程师,主要从事永磁直驱电机驱动设计、机器人驱动控制系统设计与控制理论研究。作为核心骨干参与国家自然科学基金,国家科技支撑计划,中科院重点部署项目,浙江省重点研发计划项目,及宁波市重大专项等近10余个项目。获国家授权发明专利5项,授权实用新型3项,其中获中国专利优秀奖1项。在国内外学术期刊和国际学术会议上发表论文10余篇。

方灶军,博士,研究员,博士生导师,宁波市领军与拔尖人才(第二层次),从事视觉测量与机器人控制、绳驱动机器人、移动机器人定位导航方面研究。主持国家自然科学基金重点项目、国家重点研发计划“智能机器人”专项、国家科技支撑计划、浙江省重点研发计划等项目,作为骨干参与国家“863”计划、工信部数控科技重大专项、国家自然科学基金等项目,发表学术论文100余篇,其中SCI检索论文30余篇,授权/申请国家发明专利...

中科院上海分院宁波材料所在Accounts of Materials Research上发表综述“碳基Janus薄膜―用于传感、驱动及其一体化柔性智能器件”(图)
宁波材料所 碳基Janus薄膜 传感 驱动 一体化柔性智能器件
2023/2/4
Janus薄膜由于具有不对称的结构和独特的物理或化学性质,在传感、驱动、能源管理和先进分离等方面表现出了巨大的应用潜力。其中,仿生柔性皮肤由于兼具灵敏感知、驱动和功能集成等特点,已经引起了人们广泛的研究兴趣。为实现这些特定的功能,需要选择合适的活性功能材料并以可控的方式形成不对称的结构。碳纳米材料由于具有优异的导电和导热性能、本征机械柔韧性、高化学和热稳定性、易于加工等优点,是一种极具应用前景的活...
宁波材料所在磨抛机器人方面取得进展(图)
磨抛机器人 系统结构 氮气弹簧
2023/7/13
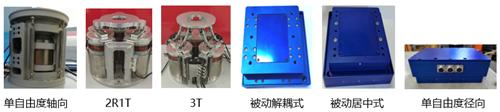
磨抛是典型的连续接触式操作,力控技术直接影响磨抛效率和质量,因而至关重要。传统上,一般采用基于机器人关节力矩的直接力控方法,存在力控精度低、动态响应慢等缺点。而机器人加力控末端执行器的间接力控方法采用了宏微系统结构,在小范围内动作时只需调整力控末端执行器的位姿即可,避免了宏机器人大惯性动作对力控精度和动态响应的影响,可有效解决直接力控方法存在的问题。目前,虽然有研发机构或公司研制了力控末端执行器,...
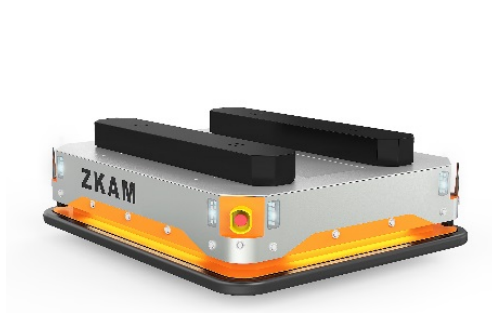
本项目创新设计了一种基于解耦式主动万向脚轮的全向移动机器人,可实现0-360°的无滑转滑移的运动,与传统移动式机器人相比,其具有无转弯半径且灵活高效的优势。围绕全向移动式机器人,精密驱动与智能机器人技术团队掌握了相关的高效直驱电机设计技术、高性能直驱电机驱动控制及底层运动控制技术和机器人定位导航等核心关键技术,拥有核心技术知识产权,可根据需求进行定制化。在机器人与智能制造装备技术的市场需求日益增长...

智能化、类人化、柔性化是未来机器人发展的重要趋势。人形机器人,尤其是具备人工智能算法功能的人形机器人,不仅可以在日常生活中用于个人协助和护理,而且可以在危险任务中用于搜索和救援等。机器人的感知系统能够从外界收集数据,并根据外界环境的变化做出不同的响应,这对于提高机器人的服务质量和寿命是至关重要的。其中,痛觉感受器是一类重要的传感器,它可以识别来自于外界温度、压力等极端条件的潜在危险,并产生预警信号...
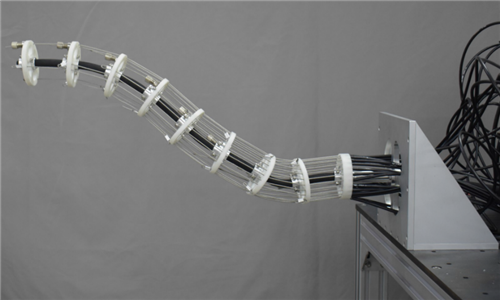
中国科学院宁波材料技术与工程研究所精密驱动与机器人团队利用了绳索的高效力传导以及具有本质柔性的特点,研发了具有多个关节模块的绳索驱动连续体机器人臂,绳驱动机器人臂采用多根轻质绳索协同驱动,与传统主动关节驱动的机器人臂不同,绳驱动机器人臂是由被动关节支撑,主动绳索驱动,由于主动绳索的驱动装置全都安装在机座上,因此绳驱动机器人臂具有自重轻、转动惯量小和易于实现变刚度控制等优点,既能够产生本质安全的运动...

南开大学人工智能学院于宁波教授(图)
于宁波 南开大学人工智能学院 教授 医疗康复机器人 医疗人工智能
2022/7/13
于宁波,南开大学人工智能学院,教授。研究方向:医疗康复机器人,医疗人工智能。近年来得到国家重点研发计划,国家自然科学基金重点、国际合作重点、面上和青年项目,天津市和南开大学建设经费等的立项支持,本课题组基于功能近红外fNIRS、脑电EEG、肌电EMG等神经和生理信息采集设备,运动捕捉、足底压力采集、力反馈等人体运动测量和交互设备,以及多种自研系统,密切与临床团队合作,建立了人机灵巧力触觉交互、机器...

浙大宁波理工学院信息科学与工程学院硕士生导师马连伟教授(图)
智能控制 微纳系统控制 深度学习 机器人控制
2021/10/27
博士、教授、硕士生导师,省中青年学科带头人,中国自动化学会过程控制专业委员会委员、中国自动化学会青年工作委员会委员。1999年和2002年分别于沈阳化工大学化学工程系获工学学士和工学硕士学位,2007年12月于上海交通大学控制理论与控制工程专业获工学博士学位。2008年1月起在浙江科技学院任教,2010年任副教授,2016年任教授。2014年9月-2015年9月赴加拿大Concordia大学从事访...

2019年6月27日下午,新加坡南洋理工大学教授陈义明应中国科学院宁波材料技术与工程研究所副所长、所属先进制造所所长杨桂林研究员的邀请到宁波材料所进行学术交流,并做了题为“智能机器人与隐形冠军:探讨机器人系统、视觉与学习”的报告。陈义明的报告从物流机器人、建筑机器人以及社交教育机器人在行业中的实际应用为例,介绍了机器人从研究到产业化应用中所面临的机遇及挑战。陈义明认为,机器人应用于建筑制造及服务行...
