
搜索结果: 1-15 共查到“控制科学与技术 控制”相关记录5260条 . 查询时间(0.291 秒)

2024年3月18日南开大学教授孙宁做客CAA云讲座并作题为“仿生气动机器人动力学分析与智能控制”的报告。
中国科学院沈阳自动化研究所专利:一种可旋转舵推进器的水下机器人控制方法

2020级机电控制工程专业智能机器人竞赛成功举办(图)
机电控制 智能机器人
2024/3/7
2024年1月3日上午,“SMC”杯气动智能机器人大赛、“海天集团”杯液压气动创新设计竞赛暨2020级机电控制工程系二级项目验收,在燕山大学东校区液压实验室成功举办。燕山大学机控系主任袁晓明和部分教师代表出席本次活动,2020级机电控制工程专业全体本科生参加此次竞赛活动。
中国科学院合肥物质科学研究院专利:一种基于二次谐波混合有源滤波装置的控制方法
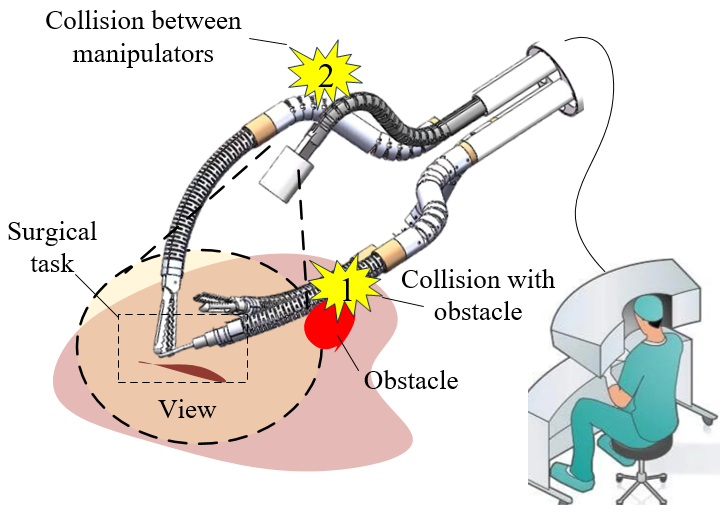
沈阳自动化所在连续体机器人主动避障控制方面研究取得新进展(图)
连续体机器人 医疗机器人
2024/1/12
2023年12月28日,中国科学院沈阳自动化研究所刘浩研究员与友谊医院张忠涛教授在连续体机器人的主动避障控制方面研究取得新进展,相关成果以Active collision avoidance for teleoperated multi-segment continuum robots toward minimally invasive surgery为题在The International Jo...
中国科学院合肥物质科学研究院专利:一种临液氦温度的精确温度控制系统
中国科学院合肥物质科学研究院 专利 临液氦温度 精确温度 控制系统
2023/12/26
中国科学院合肥物质科学研究院专利:一种临液氦温度的精确温度控制系统
中国科学院合肥物质科学研究院专利:温室群的智能控制系统
中国科学院合肥物质科学研究院 专利 温室群 智能控制系统
2023/12/20
中国科学院合肥物质科学研究院专利:温室群的智能控制系统
基于扩展PI抗扰补偿器的高精度时间同步控制
扩展PI抗扰补偿器 零极点优化/时间同步 网络控制系统 周期性扰动
2024/1/16
高精度时间同步是任务关键型工业网络控制系统的核心支撑技术,针对工业环境中普遍存在周期性振动等扰动信号导致晶振频率漂移,影响时间同步精度的问题,基于扩展比例积分(Proportional integral,PI)观测器,提出一种新型的抗扰补偿器结构,用于消除周期性扰动的影响,并构建了相应的精细抗干扰反馈控制方法,用于实现高精度时间同步。
基于滚动时域强化学习的智能车辆侧向控制算法
滚动时域 强化学习 智能汽车 侧向控制
2024/1/16
针对智能车辆的高精度侧向控制问题,提出一种基于滚动时域强化学习(Receding horizon reinforcement learning,RHRL)的侧向控制方法.车辆的侧向控制量由前馈和反馈两部分构成,前馈控制量由参考路径的曲率以及动力学模型直接计算得出;而反馈控制量通过采用滚动时域强化学习算法求解最优跟踪控制问题得到。
机械臂变长度误差跟踪迭代学习控制
迭代学习控制 误差跟踪 变迭代长度 机械臂
2024/1/16
针对任意初始状态下机械臂轨迹跟踪问题,提出一种变长度误差跟踪迭代学习控制(Iterative learning control,ILC)方法.首先,构造不依赖于期望轨迹的双曲余弦型期望误差轨迹,放宽经典迭代学习控制初始状态要求严格一致的条件.由于该误差轨迹只需设置一个常数项,因而能够有效减少计算量,使得期望误差轨迹的设计更为简单.其次,考虑机械臂运行区间随迭代次数变化的问题,构建虚拟误差变量补偿机...
针对轧机机电液垂扭耦合系统存在耦合振动问题,提出一种基于耦合反步法的轧机垂扭耦合振动抑制控制策略.首先考虑轧机传动系统、液压系统与辊系机械间的相互影响,根据动力学定理,建立轧机机电液垂扭耦合振动数学模型.其次考虑到轧机耦合垂振系统和耦合扭振系统间存在状态耦合关系,利用耦合反步法,解决了振动控制器设计中存在的相互嵌套问题。
智能网联电动汽车节能优化控制研究进展与展望
智能网联 电动汽车 节能 优化控制
2024/1/16
提升纯电动汽车整车能效、降低百公里耗电量,是我国新能源汽车产业发展的重大需求.智能网联背景下,V2X(Vehicle to everything)网联信息以及激光雷达、毫米波雷达、摄像头、定位及导航装置等各类车载传感器,为智能网联电动汽车(Connected automated electric vehicle,CAEV)提供了全方位的信息交互、共享和状态感知能力,赋予了其巨大的节能优化潜力。
中国科学院合肥物质科学研究院专利:太阳辐射跟踪控制装置
中国科学院合肥物质科学研究院 专利 太阳辐射 跟踪控制装置
2023/12/19
中国科学院合肥物质科学研究院专利:太阳辐射跟踪控制装置