
�������: 1-15 ���鵽��֪ʶ�� ���ա������ѧ���� ����������ؼ�¼344�� . ��ѯʱ��(0.056 ��)
������������(Flapping wing micro aerial vehicle,FWMAV)������Ч�ʸߡ������ᡢ���ܵ͡�������ǿ�������ŵ�,���������о���Ӧ����ռ����Ҫ��λ.Ŀǰ,FWMAV��̬���Ƴ�Ϊ�����������о�������о��ȵ�.���FWMAV��̬��������,����ƽ���������ۿ�������һ��FWMAV���Ŷ���̬������.ͨ�������˹�ϵͳ(Artificial systems,A)������ʵ��(C...
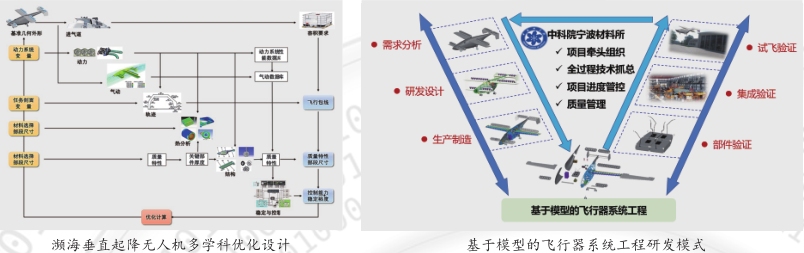
�й���ѧԺ�������ϼ����빤���о����Ƚ����켼���о���������������ϵͳ���ɼ�������ͼ��
�Ƚ����켼���о��� ���ַ����� ϵͳ���ɼ���
2023/3/16
Χ�ƹ��ҿ��췢չս�Ժ��㽭ʡ���պ����ҵ��չ���۽����Ϻ����켼���ڿ��������������ԭʼ���º���Ӧ�ã��ص㿪չ��ֱ���ٽ����ռ��������з����Ƚ�������ɫ�Ŀ���ǰ�ؽ��漼���о���������������������ϵͳ�з�������ģ�͵�ϵͳ���̼�����������ǰ�ؽ��漼�������ص㷽��

�й��Զ���ѧ��������������������רҵίԱ����2018��7�¾����й��Զ���ѧ�����������ҿ��������պ����ѧ����һ��רί�������Ƕκ������ڡ���רί�����ɫ�������ϡ��������빤�̽�ϣ������������ںϣ������뺽����ϡ�
һ��С��������ת�����������IJ������
���� ���˷����� �ڲ��ṹ ��ά��ģ
2020/4/24
������������7 kg����ת�������˻����壬ȷ���������붯���������ڲ��ṹ�����Ѿ���������IJ��������Ͻ�����ά��ģ��ơ�
����ٽ��ռ��ж����߳�������������NSPHV��������ԾѲ���켣����ƹ滮���⣬�����һ�ֻ�����������ģ�����Լ�������µĹ켣�滮���������ȣ�����NSPHV����ѧģ�ͣ���Σ�����NSPHV��������ԾѲ�������ص�������Ը߶�Ϊ�ڵ�Լ��������Ϊ���������Ƶ������������ѹ�����ɹ��ڸ߶ȵļֶ����ں����������֮����һ���Ĺ��DZ仯�����ӣ�������ֱ�ӷ��Թ��ǽ�����⡣������õ��ٶȡ�������ǡ��߶Ⱦ���...
Ϊ�����������һ����Ͷ�Ż�����������£���ζ�̬����ನ�λ������⡣��Ŀ���ֵ��Ŀ����в�������������ϵ��������̬���������Ŀ���Ż�ģ�ͣ�DWTA������DWTAģ���°��������ӻ�������ģ�ͣ�SWTA������һ���ε�SWTA����һ����SWTA�Ĵ��Ч����Ϊ���������и��¡��Ľ��˻�Ϲ����ݶȷ��Ķ�Ŀ��ֽ�����㷨��MOEA/D������������˹�Ŷ������ɳ�ʼ�����㼯�ϣ������ù����ݶȷ����������������㷨...
����Backstepping-L1����Ӧ���Ƶ������������ݴ�����
���������� Backstepping-L1����Ӧ���� �ݴ����� ��ȷ����
2018/2/8
����������������ƹ����д��ڲ��������š��ɻ���������δ��ģ��̬�Ȳ�ȷ����,�����һ�ֻ���Backstepping L1����Ӧ���Ƶ������������ݴ����Ʒ���������,�ڲ����Dz�ȷ���Ե������,���������������Ķ���ѧ���̺��˶�ѧ����,����Lyapunov������������˻���Backstepping���Ƶ���̬������,ʵ���˱ջ�ϵͳ���ȶ�����,����Ӧ���پ�ȷ�����,���Dz�ȷ���Զ�ϵͳ��Ӱ��,��Backste...
����CFD�������㷨�������������������ģ��
����������� ʱ���������㷨 ����������ѧ ͨ������ �״�ɢ�����
2018/11/20
Ϊ�о��������ĵ���������ԣ�������ڼ���������ѧ��CFD����ʱ���������㷨��������������ƽṹ����չ����̩�ռ��������С���˼����ƽ����㷨�漰�Ŀռ䵼�������CFD��������������Steger-Warmingͨ�����Ѵ����ռ���ɢ�漰��ͨ�����㣬�����IJ�Runge-Kutta��ʽ�ƽ����ʱ����ɢ�������ø��㷨�Ե�Ų��Ӳ�ͬ��������ƽ��ɻ�ģ�͵ĵ��ɢ�䳡��˫վ�״�ɢ�������з�����������������ñ�...
��Ա������������ι����еĸ��ٿ������⣬�����л����Ա�����������۽����˱���������ģ�͡�Ϊ�����Ʊ��ι����п������л��Ͳ�ȷ���Ե�Ӱ�죬��֤�ջ�ϵͳ����ʱ���н�ͬʱ����ָ����H������ָ�꣬����ģ̬����ƽ��פ��ʱ�䷽���Ͷ�Lyapunov�������������һ���л�����ʱ��H���ٿ���������Ʒ�������������ϵͳ������ʱ��³���ȶ��ԣ�ͨ��������Ծ���ʽ�õ����������ڵij�����������������������᷽���ܹ�ʹ...
��Шǰ��������FADSϵͳפ��ѹ�����������㷨���ȵ�Ӱ��
Ƕ��ʽ�������ݴ���(FADS)ϵͳ ��Шǰ�� BP������ פ��ѹ�� ����
2016/11/2
��Լ�Шǰ�壨��˲��壩��������Ƕ��ʽ�������ݴ��У�FADS��ϵͳ���ڽ�ģ���Ѽ�����ģ�;��ȵ͵�����,���Ȳ���BP�����罨ģ���洫ͳ��FADSϵͳ��������ѧ��ģ�ķ�������������˫��������IJ�������ģ�ͣ�Ȼ��ͨ������ѡ������ṹ������ѵ����֤����FADSϵͳ�Ĺ��ǽ��н��㣬����פ��ѹ�����㷨���ȵ�Ӱ������о���������������Ľ����ĺ���˫��������IJ�������ģ�;��Ƚϸߣ����Dz������С�ڪ�0.2...
��Ը߳����������������������������������������ì�ܵ����⣬���ø߾����������������㷽���������˻���ֱ��ȫ���Ż��㷨���������߲�����������Kriging����ģ�͵Ķ�ѧ���Ż����ƽ̨�����Ե��߳����ٲ������������ο�չ����/����һ�廯�Ż�����о�����������������岼�ֵ���״̬���������3.13��ߵ�3.69�����Ǵ�ֱ������ˮƽ����״̬��������30����״�ɢ�Ƚ��棨RCS����ֵ�½�60%���ϣ�������...
��Զ�Լ�������·�ʱ��Ŀ����������չ�˻�����ԳƲת��(STT)���ƵĻ������������������Ƶ������о������һ������Ͳ���ͬʵʩ�����������Ƶ�����������ͨ���߶�-��̣�H��R��������߶�-�ٶȣ�H��V������������ƣ�������Լ���Ŀ������ڿ�������һ���ο��켣��������Ŀ��仯ʵʱ������ͬʱ��ɲο��켣���١�����ͨ�����뵱ǰ�����ٶȺ�Ŀ��λ�ñ仯��Ϣ���Ƶ��˱ջ��Ƶ�������ʵ���ٶȿ�����Ŀ��λ�ø���...
��Ը߳����������������������Ƶ�����̬�������⣬�����������������ٶȷ�������ͨ�������ʽ���ģ�ͣ����һ����ӱ���Ƶ�����ϵͳ��Ʒ����������߳���������������������ɶ�(6DOF)���ĺ������Ķ���ѧ���˶�ģ�ͣ���Ŀ��-��������ά(3D)�ռ�����˶�ģ��Ϊ�����������ն˻�ģ���Ʒ������㻯����(LOS)������ԭ���õ��������������ؽ��������Ӧ�ĸ�����ƫ����ת������ָ��˿�ϵͳ���ڻ�ģ����������ɸ���ͨ...
��Ժ��в�ȷ���Ŷ��������ʽ�߳��������������������ģ�ͣ������һ�ֻ���ָ���˲����ķ��ݿ��Ʒ�����������������ѧģ�ͻ���Ϊ��������ϵͳ���ٶ���ϵͳ����ʾΪ�ϸ�����ʽ�����ö�̬�淽����Ʒ��ݿ�����ÿ�������������������ָ���˲������в����������в���������ָ���˲�����ȡ�����������һ����������˷��ݿ��Ʒ����еġ��������͡����⣬ͬʱ���������������ʵ�ʿ������ķ�ֵ�����ʺʹ���Լ����������չ״̬...
�й��о����������а�-��
- ���ڼ���...
�й�ѧ���ڿ����а�-��
- ���ڼ���...
�����ѧ���л������а�-��
- ���ڼ���...
�й���ѧ���а�-��
- ���ڼ���...
�ˡ���-ƪ
- ���ڼ���...
�Ρ���-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
�������� -ƪ
- ���ڼ���...
֪ʶҪ��-ƪ
- ���ڼ���...
���ʶ�̬-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
ѧ��ָ��-ƪ
- ���ڼ���...
ѧ��վ��-ƪ
- ���ڼ���...