
搜索结果: 1-8 共查到“知识库 机械工程 机构设计”相关记录8条 . 查询时间(0.151 秒)
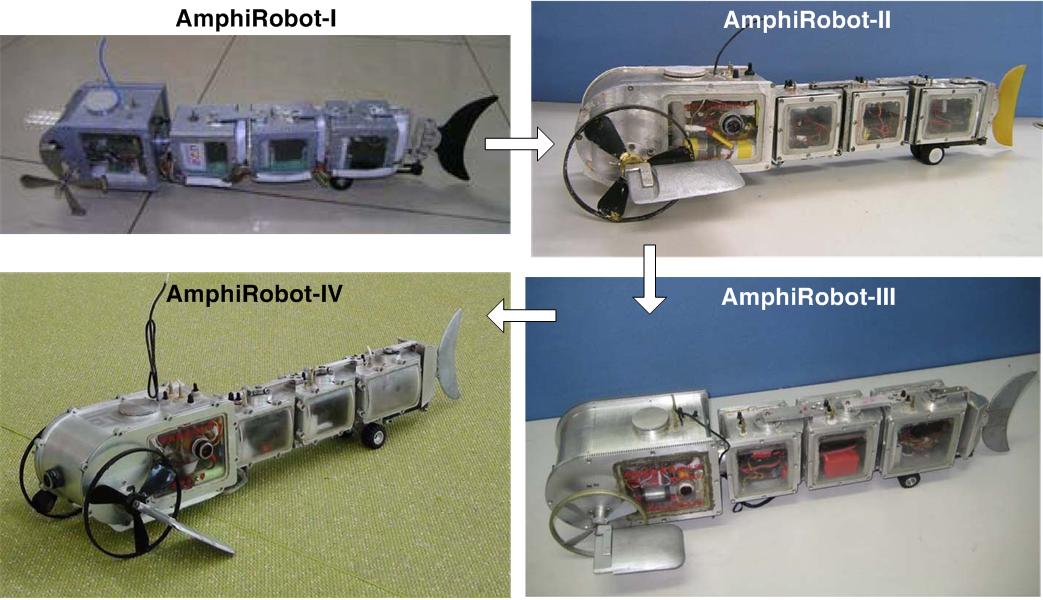
成果受到国家863项目“多模态仿生两栖机器人机构设计与运动控制 ”支持。通过机构创新和系统集成,以仿鱼推进技术为基础,辅以轮、桨、鳍一体化推进机构,研制具有快速游动性能、强大的环境感知功能及良好的水陆环境适应能力的两栖服务机器人。
针对水稻钵苗宽窄行Z字形移栽农艺要求,提出了一种差速式水稻钵苗Z字形宽窄行移栽机构,利用差速轮系的不等速传动和空间传动,以空间轨迹实现水稻钵苗Z字形宽窄行移栽。将非均匀B样条曲线理论应用于非圆齿轮节曲线的拟合,并采用坐标变换方法建立了机构齿轮箱轮系的数学模型。将水稻钵苗Z字形宽窄行移栽的轨迹和姿态要求参数化为9个具体的运动学优化目标,编写了基于机构数学模型的可视化参数优化界面,利用该软件界面分析了...
一种串联张紧式恒力矩机构设计及实验研究
恒力机构 恒力矩机构 低重力模拟 重力补偿
2017/12/1
设计了一种串联张紧式恒力矩机构.恒力矩机构的作用是吸收电机在高频冲击下的响应滞后,被动保持吊索恒定张力.旁路张紧式恒力机构存在吊索在滑轮处压迫变形导致的摩擦问题.要避免这种摩擦带来的能量损耗,选择使用不含滑轮的串联张紧式恒力矩机构.从做功-储能观点,恒力矩机构是具有恒定的储能-转角比例的储能机构.基于此观点,提出压簧-凸轮-扭杆和压簧-扭杆两种恒力矩机构方案,分别对其进行原理分析和理论验证.综合比...
可变约束两级输出的行星轮系机构是基于行星轮两自由度结构特点而设计,能实现在传动过程中自动转变输出运动状态.针对本文设计的可变约束两级输出的行星轮系机构,先后进行了传动理论分析、三维模型搭建、运动学和动力学的ADAMS软件仿真和仿真结果分析,初步论证了可变约束两级输出的行星轮系机构的可行性,为以后在过载保护、工况自动选择、信息反馈等机械传动过程方面的应用具有重要价值.
高压管汇自动焊接系统――送丝机构设计(二)
自动焊接 送丝机构 8051单片机
2009/7/29
围绕拟定的自动控制方案,以8051单片机为核心设计了具体应用电路,并对主要执行部件――步进电机进行了选型设计,从脉冲分配、电机转向、驱动要求等方面提出了对控制系统的要求,给出了以汇编语言编写的主要控制程序。全套系统功能完善,结构简单,具有送丝稳定、调节方便、适应能力强等特点。
空间转动三自由度并联微调机构设计与运动学分析
并联机构 三自由度 运动学分析
2009/1/15
根据并联机器人机构综合理论,设计了一种能实现重载情况下空间转动的三自由度并联微调机构,由运动平台、固定平台、驱动支链及从动支链组成,具有平衡稳定、承载能力强、位置精度高的特点。通过对该机构的运动学研究,求出其运动学位置逆解、正解及速度解。借助Matlab软件进行了运动学仿真分析,并提供了该并联机构在盾构管片拼装机上的应用实例,证明该并联机构可实现重载情况下空间微调精确定位。
铲运机工作机构设计方法研究
矿用铲运机 工作机构 优化设计 有限元法
2007/12/5
根据矿用铲运机工作机构处于插入工况、运输工况、举升工况和卸载工况的特点,建立了其六连杆工作机构的优化设计数学模型,编制了优化程序,以WJD1.5m3矿用铲运机工作机构为例进行优化设计计算,并对设计前后工作机构的应力场进行了有限元建模和分析。研究结果表明,充分利用现代设计方法可以有效解决机构干涉和铲运机各技术指标的满足问题,并缩短产品的设计和开发周期。