
搜索结果: 61-75 共查到“知识库 航空、航天科学技术”相关记录11586条 . 查询时间(0.372 秒)
问天实验舱里的沈自所智慧――科学实验柜主结构
实验柜 空间站建设 载人航天
2022/9/6
问天实验舱部署的生命生态实验柜、生物技术实验柜、科学手套箱与低温存储柜和变重力科学实验柜的主结构均由中国科学院沈阳自动化所承研。这是2021年天和核心舱发射入轨以来,沈阳自动化所继续为中国空间站建设提供重要装备。
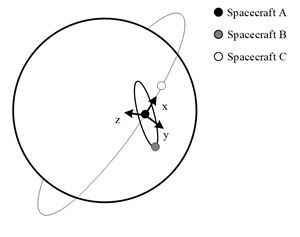
国内外相关研究表明,仅利用相对测量信息即可实现编队航天器的自主导航。其中,航天器间的相对距离信息可通过微波测距或激光测距仪测量得到,相对视线(LOS)信息可通过光学相机测量得到。利用星敏感器提供的惯性基准,将相对位置矢量转换到惯性坐标系,通过对一段时间内的相对位置矢量进行连续测量,即可确定所有成员航天器的绝对轨道要素。这种方法需要将测量信息输入到序贯滤波器中,从而实现自主导航,因此需要一定精度的航...
基于非线性干扰观测器的飞机全电刹车系统滑模控制设计
飞机防滑刹车系统 终端滑模控制 非线性干扰观测器 反馈线性化
2024/1/18
飞机防滑刹车具有典型的强非线性、强耦合和参数时变等特点,并且跑道环境的干扰容易对飞机的地面滑跑性能造成不利影响.本文提出了一种基于非线性干扰观测器的飞机全电防滑刹车系统滑模控制设计方法.首先,考虑了实际刹车不确定性干扰条件下的防滑刹车动力学建模问题,通过对高阶非线性刹车系统进行反馈线性化处理,简化了基于严格反馈的模型.其次,基于对主轮打滑原因的深入分析,设计了非线性干扰观测器对干扰进行在线估计,并...

哈尔滨工业大学交通科学与工程学院科研成果机场飞行导航监视管理系统。
二自由度无人直升机的非线性自抗扰姿态控制
二自由度无人直升机 姿态控制 自抗扰控制 扩张状态观测器
2024/1/22
无人机高性能姿态控制的难题之一是无人机系统模型通常无法精确建立且受到复杂外部干扰的作用.针对这一难题,本文提出了二自由度无人直升机姿态控制的非线性自抗扰控制设计方法.该方法的主要思想是将系统内部的未建模动态和外部干扰等不确定性因素作为“总扰动”,利用输入输出信息在线观测,并在反馈控制环节对其进行补偿.本文发展了非线性扩张状态观测器与非线性反馈控制律用以提高控制品质。
针对基于旋翼无人机的近地面空间应急物联网在缺少地面基站和能量受限的情况下,可靠节能地远距离传输重点区域全信息的要求,研究由无人机组成的移动Ad-Hoc网络的远距离通信问题,提出近地面空间应急物联网空地节点动态协同部署方法.首先,对该类物联网进行系统建模;其次,根据所建模型中无人机编队大范围、队列化、微漂移地分散于监测区域的特点和编队的联合分布情况,在提供可靠通信的同时,将系统通信能耗和移动能耗的计...
提出了基于有向图的航天器姿态协同控制算法,并且系统的角速度和控制输入满足有界性的约束.当外部扰动存在时,设计了自适应算法估计扰动的上界,采用滤波器补偿的方法处理控制输入饱和问题,并且设计了新的自适应姿态协同控制算法.对于所设计的控制算法,给出了稳定性分析,证明了系统具有几乎全局渐近稳定性.进一步把控制算法推广到时变通信时滞情况,当控制器参数满足一定条件时,仍然能够保证编队系统的几乎全局渐近稳定性....

电动无杆飞机牵引车(图)
电动无杆飞机牵引车 电池 电驱动
2022/5/21
电动无杆飞机牵引车为张军副教授与西安睿诺航空装备有限公司联合开发,系统以电池为系统动力,具有电液混动功能,液压动作实现飞机的抱轮、提升动作,电驱动实现牵引车的行驶和转向,可实现10t飞机的牵引要求。

给飞机装上智慧“大脑”(图)
飞机 飞机飞行 机载设备
2021/3/11
今天,飞机已成为重要的交通工具。为了更好地控制飞机飞行,工程师在飞机上安装了各种装置。如航空仪表、无线电台、控制系统、导航系统等,人们统一称之为机载设备。20世纪70年代前,飞机机载设备都是机械式的,各自独立发挥作用。随着大规模集成电路的发展,计算机的体积越来越小,运算速度越来越快,工程师开始将计算机安装在飞机上,以便更好地控制各个系统高效工作。
空间信息与导航定位研究所
卫星导航定位 土地调查监测技术 应用服务系统
2022/9/19
基本概况:空间信息与导航定位研究所一直把“面向国家和地方需求、面向世界科技前沿,立足自主创新,坚持产学研用相结合”作为发展理念,不断致力于技术创新和成果应用,是国内较早从事卫星导航定位以及GNSS/GIS/RS(3S)理论与技术研究的机构,发展建立了伽利略欧亚教育与研发国际联合研究中心、国土资源部土地调查监测技术重点实验室。
针对北斗导航卫星系统首创的GEO+IGSO+MEO混合星座设计,本文研究了根据不同星座,采取不同约束条件和数据处理策略的北斗卫星精密定轨方法,提出了一种针对北斗系统混合星座的分层约束精密定轨方案。该方案首先将北斗卫星分为非GEO(IGSO/MEO)和GEO两部分进行解算,利用GPS解算的公共参数对北斗IGSO/MEO精密定轨形成有效约束,然后固定GPS和北斗IGSO/MEO解算结果,最后单独对北斗...
斗三号卫星导航信号接收机端伪距偏差建模与验证
北斗三号全球导航卫星系统 伪距偏差 混合类型接收机 DCB估计
2021/6/30
接收机端伪距偏差是指非理想的卫星导航信号在接收机前端带宽和相关器间隔不同时产生的伪距测量系统性偏差。研究表明,北斗二号、GPS和Galileo系统均存在与接收机类型相关的伪距偏差,影响基于混合类型接收机站网的精密数据处理。本文基于iGMAS网和MGEX网观测数据,采用MW组合、伪距残差和伪距无几何距离无电离层组合3种方法分析北斗三号接收机端伪距偏差特性。试验结果表明,北斗三号同样存在与接收机类型相...
北斗三号卫星多频多通道差分码偏差估计与分析
北斗三号全球导航卫星系统 多频多通道 差分码偏差 一致性 稳定性
2021/6/30
差分码偏差(DCB)是电离层建模与导航定位授时的主要误差源,北斗多频多通道信号衍生出一系列新的DCB。本文首先分析了北斗三号卫星的码观测值组合及可估的DCB类型,建立了北斗三号卫星多频码偏差估计的数学模型,利用IGS实测数据首次估计得到了22种不同类型的北斗DCB。在此基础上,全面比较分析了各类DCB的内符合精度、外符合精度及月稳定度。结果表明,北斗三号卫星各类DCB的闭合差基本都在0.2 ns以...
2020年6月23日,我国北斗三号全球导航卫星系统正式完成星座全球组网。北斗三号全球导航卫星系统采用新一代全球广播电离层延迟修正模型(BDGIM),为用户提供电离层延迟改正服务。本文利用高精度全球电离层格网(GIM)以及实测BDS/GPS数据提供的电离层TEC作为参考,从延迟改正精度及北斗单频伪距单点定位应用、模型系数性能等方面,对北斗三号系统组网前后(2020年5月1日至2020年7月20日)B...
复杂空域条件下多元空间信号侦测与地空协同控制技术及应用
复杂空域 无线电信号侦测 地空协同控制
2022/10/10
成果针对基于无人机对复杂空域无线电信号侦测技术和系统进行了研究,从硬件设计集成、信号捕获算法、场景化平台搭建、无人机长航时置空等四个方向进行了创新。